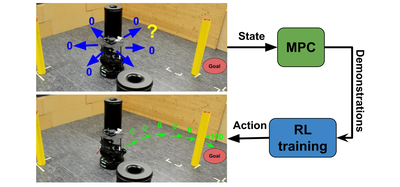
A Robust Placeability Metric for Model-Free Unified Pick-and-Place Reasoning
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2026
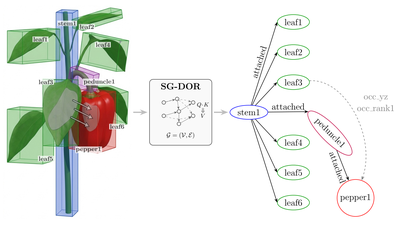
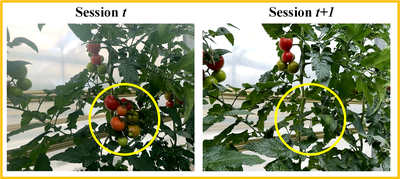
SG-DOR: Learning Scene Graphs with Direction-Conditioned Occlusion Reasoning for Pepper Plants
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2026

Designing Privacy-Preserving Visual Perception for Robot Navigation Based on User Privacy Preferences
IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), 2026
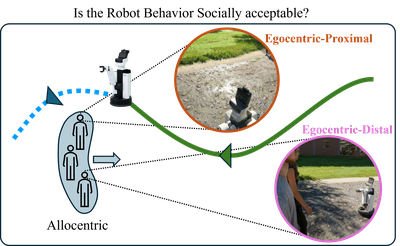
Point of View: How Perspective Affects Perceived Robot Sociability
IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), 2026
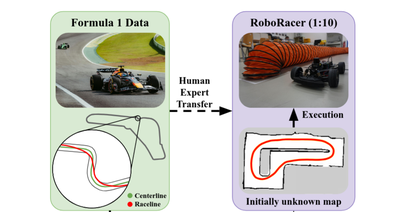
Efficient Trajectory Optimization for Autonomous Racing via Formula-1 Data-Driven Initialization
IEEE International Conference on Intelligent Transportation Systems (ITSC), 2026

Interpreting Context-Aware Human Preferences for Multi-Objective Robot Navigation
International Conference on Social Robotics (ICSR), 2026
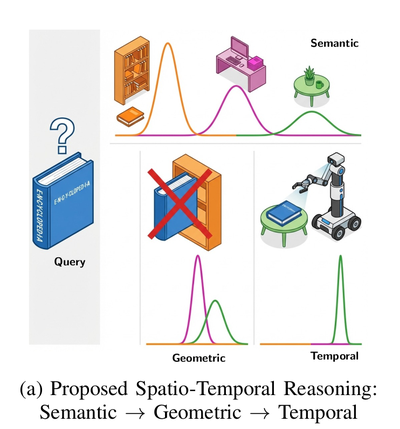
O-STaR: Open-Vocabulary Object Search through Spatio-Temporal Reasoning on Dynamic Scene Graphs
Proceedings of 2nd German Robotics Conference (GRC), 2026
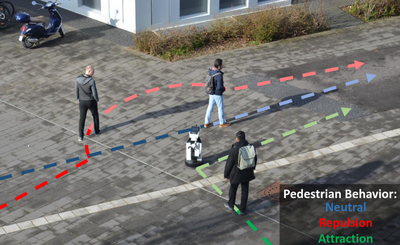
PeRoI: A Pedestrian-Robot Interaction Dataset for Learning Avoidance, Neutrality, and Attraction Behaviors in Social Navigation
IEEE International Conference on Robotics & Automation (ICRA), 2026
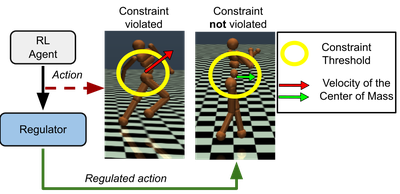
Constraint-Aware Reinforcement Learning via Adaptive Action Scaling
Learning for Dynamics & Control Conference (L4DC), 2026

Learning Perception and Manipulation of Objects in Cluttered Environments
University of Bonn, 2026