Efficient View Planning Guided by Previous-Session Reconstruction for Repeated Plant Monitoring
Abstract:
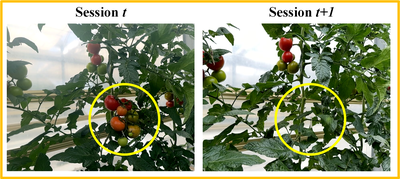
Repeated plant monitoring is essential for tracking crop growth, and 3D reconstruction enables consistent comparison across monitoring sessions.
However, rebuilding a 3D model from scratch in every session is costly and overlooks informative geometry already observed previously.
We propose efficient view planning guided by a previous-session reconstruction, which reuses a 3D model from the previous session to improve active perception in the current session.
Based on this previous-session reconstruction, our method replaces iterative next-best-view planning with one-shot view planning that selects an informative set of views and computes the globally shortest execution path connecting them.
Experiments on real multi-session datasets, including public single-plant scans and a newly collected greenhouse crop-row dataset, show that our method achieves comparable or higher surface coverage with fewer executed views and shorter robot paths than iterative and one-shot baselines.