
M.Sc.
Rohit Menon
Ph.D. Student
Contact:
Research Interest:
- Active Mapping
- Active Perception for Mobile Manipulation
- Scene and Shape Completion
Links:
About:
I am a Phd student in the Humanoid Robots Lab headed by Maren Bennewitz at the University of Bonn. I received my master's degree in Automation and Robotics from the Technical University of Dortmund in 2015. I investigate active perception for mapping and manipulation in unstructured environments.
I am currently offering thesis opportunities for motivated students within the research areas mentioned above. If you are interested in a Bachelor or Master thesis, feel free to get in touch with me.
Attention all students!
Please use https://cal.com/rohitmenon to book appointments
Research Areas:
Related Projects:
My Publications:

A Robust Placeability Metric for Model-Free Unified Pick-and-Place Reasoning
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2026
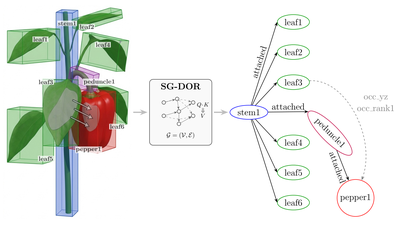
SG-DOR: Learning Scene Graphs with Direction-Conditioned Occlusion Reasoning for Pepper Plants
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2026
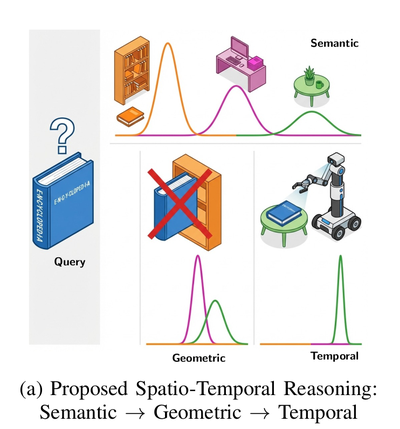
O-STaR: Open-Vocabulary Object Search through Spatio-Temporal Reasoning on Dynamic Scene Graphs
Proceedings of 2nd German Robotics Conference (GRC), 2026
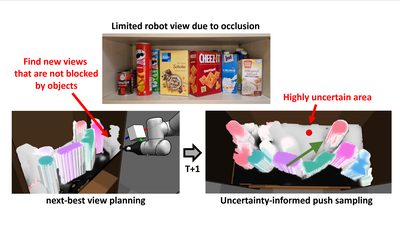
Efficient Manipulation-Enhanced Semantic Mapping With Uncertainty-Informed Action Selection
IEEE/RAS International Conference on Humanoid Robots (Humanoids), 2025
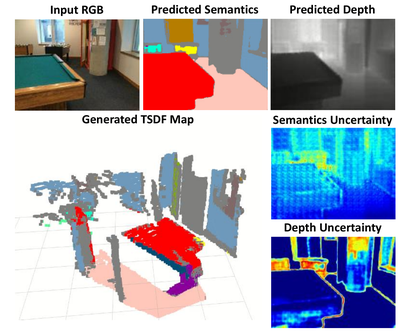
EvidMTL: Evidential Multi-Task Learning for Uncertainty-Aware Semantic Surface Mapping from Monocular RGB Images
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025
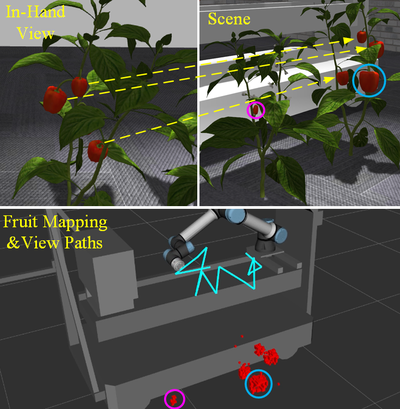
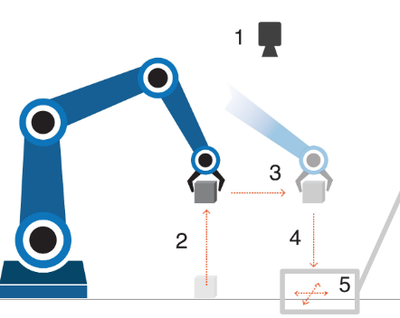
GO-VMP: Global Optimization for View Motion Planning in Fruit Mapping
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025
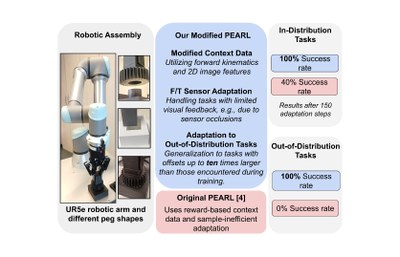
Context-Based Meta Reinforcement Learning for Robust and Adaptable Peg-in-Hole Assembly Tasks
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025
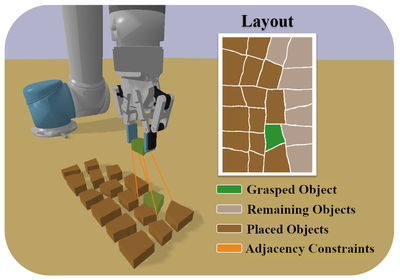
Compact Multi-Object Placement Using Adjacency-Aware Reinforcement Learning
IEEE-RAS International Conference on Humanoid Robots (Humanoids), 2024

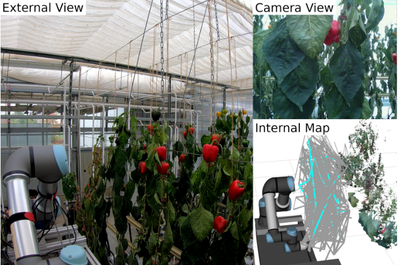
HortiBot: An Adaptive Multi-Arm System for Robotic Horticulture of Sweet Peppers
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024
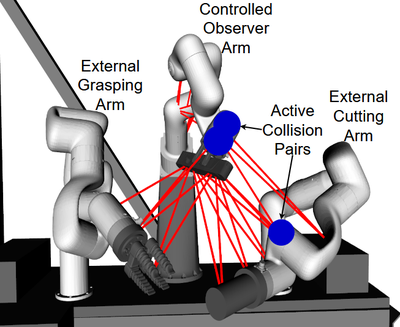
DawnIK: Decentralized Collision-Aware Inverse Kinematics Solver for Heterogeneous Multi-Arm Systems
IEEE-RAS International Conference on Humanoid Robots (Humanoids), 2023

Viewpoint Push Planning for Mapping of Unknown Confined Spaces
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023

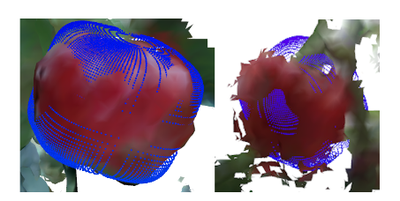
NBV-SC: Next Best View Planning based on Shape Completion for Fruit Mapping and Reconstruction
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023
Graph-based View Motion Planning for Fruit Detection
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023
Reactive Correction of Object Placement Errors for Robotic Arrangement Tasks
International Conference on Intelligent Autonomous Systems (IAS-18), 2023
Fruit Mapping with Shape Completion for Autonomous Crop Monitoring
IEEE International Conference on Automation Science and Engineering (CASE), 2022