
Dr.
Nils Dengler
Alumni
Contact:
Research Interest:
- Semantic mapping
- Reinforcement learning
- Object manipulation
Links:
About:
I am a Ph.D. student at the Humanoid Robots Lab headed by Maren Bennewitz at the University of Bonn. I received my master's degree in Computer Science from the University of Bonn in 2021.
Research Areas:
Related Projects:
My Publications

A Robust Placeability Metric for Model-Free Unified Pick-and-Place Reasoning
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2026
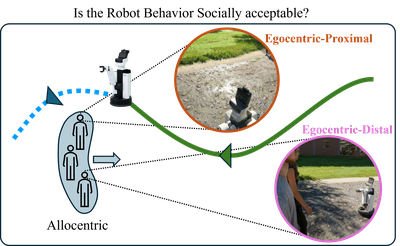
Point of View: How Perspective Affects Perceived Robot Sociability
IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), 2026
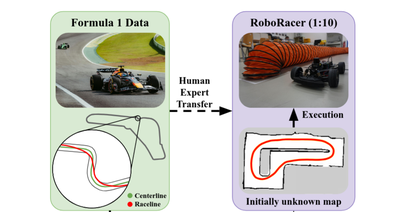
Efficient Trajectory Optimization for Autonomous Racing via Formula-1 Data-Driven Initialization
IEEE International Conference on Intelligent Transportation Systems (ITSC), 2026

Interpreting Context-Aware Human Preferences for Multi-Objective Robot Navigation
International Conference on Social Robotics (ICSR), 2026
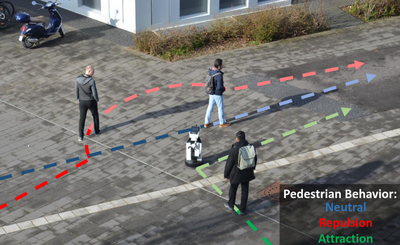
PeRoI: A Pedestrian-Robot Interaction Dataset for Learning Avoidance, Neutrality, and Attraction Behaviors in Social Navigation
IEEE International Conference on Robotics & Automation (ICRA), 2026

Learning Perception and Manipulation of Objects in Cluttered Environments
University of Bonn, 2026
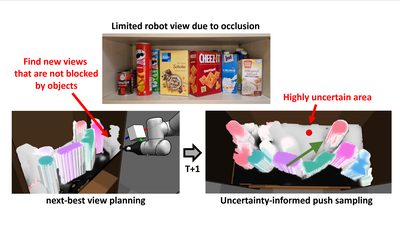
Efficient Manipulation-Enhanced Semantic Mapping With Uncertainty-Informed Action Selection
IEEE/RAS International Conference on Humanoid Robots (Humanoids), 2025
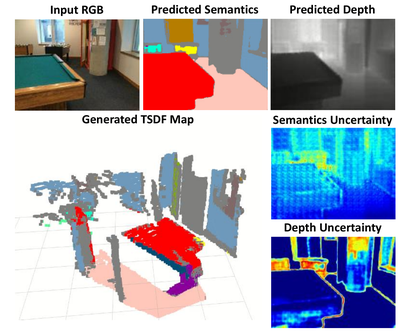
EvidMTL: Evidential Multi-Task Learning for Uncertainty-Aware Semantic Surface Mapping from Monocular RGB Images
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025

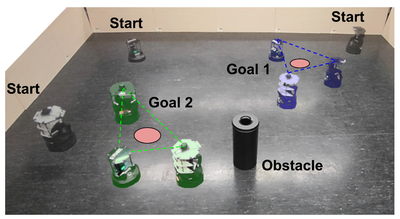
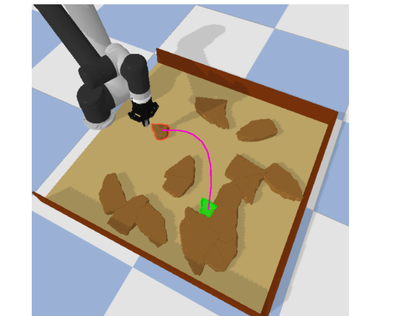
Learning Goal-Directed Object Pushing in Cluttered Scenes with Location-Based Attention
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025
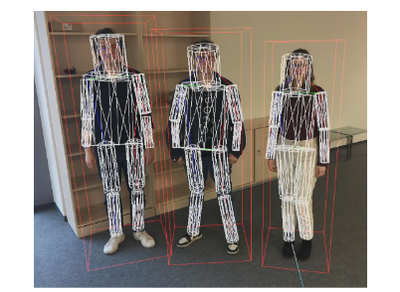
Towards Rhino-AR: A System for Real-Time 3D Human Pose Estimation and Volumetric Scene Integration on Embedded AR Headsets
International Conference on Virtual Reality (ICVR), 2025
Map Space Belief Prediction for Manipulation-Enhanced Mapping
Robotics: Science and Systems (RSS), 2025
Safe Multi-Agent Reinforcement Learning for Behavior-Based Cooperative Navigation
IEEE Robotics and Automation Letters (RA-L) and presented at the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025
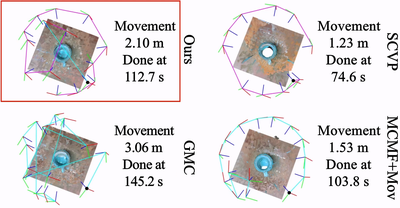
Integrating One-Shot View Planning with a Single Next-Best View via Long-Tail Multiview Sampling
IEEE Transactions on Robotics (T-RO), 2024
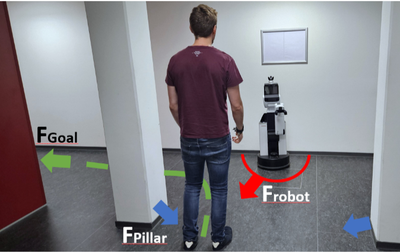
Evaluating Robot Influence on Pedestrian Behavior Models for Crowd Simulation and Benchmarking
International Conference on Social Robotics +AI (ICSR), 2024
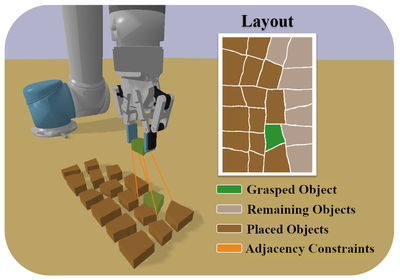
Compact Multi-Object Placement Using Adjacency-Aware Reinforcement Learning
IEEE-RAS International Conference on Humanoid Robots (Humanoids), 2024

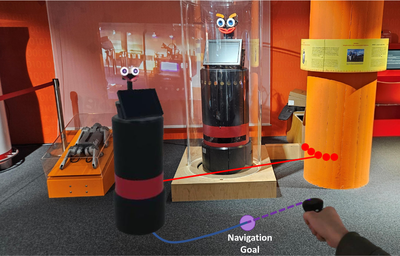
RHINO-VR Experience: Teaching Mobile Robotics Concepts in an Interactive Museum Exhibit
IEEE International on Human & Robot Interactive Communication (RO-MAN), 2024

Trust, (Dis)Comfort, and Voice Quality: Anthropomorphism in Verbal Interactions with NAO
HCI International 2024 Posters, 2024
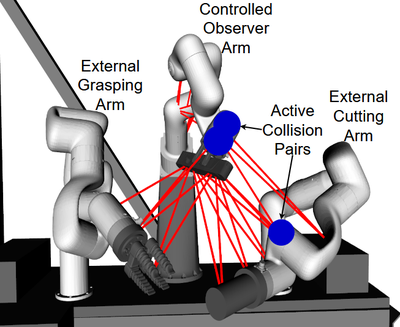
DawnIK: Decentralized Collision-Aware Inverse Kinematics Solver for Heterogeneous Multi-Arm Systems
IEEE-RAS International Conference on Humanoid Robots (Humanoids), 2023

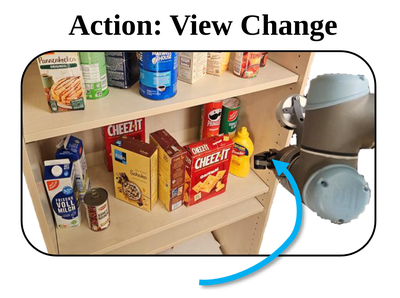
Viewpoint Push Planning for Mapping of Unknown Confined Spaces
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023

NBV-SC: Next Best View Planning based on Shape Completion for Fruit Mapping and Reconstruction
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023
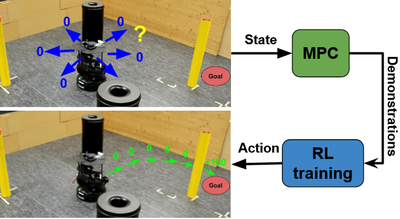
Handling Sparse Rewards in Reinforcement Learning Using Model Predictive Control
IEEE International Conference on Robotics & Automation (ICRA), 2023
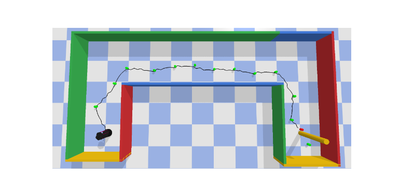
Learning Goal-Directed Non-Prehensile Pushing in Cluttered Scenes
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2022
Sensor-Based Navigation Using Hierarchical Reinforcement Learning
International Conference on Intelligent Autonomous Systems (IAS-17), 2022

Online Object-Oriented Semantic Mapping and Map Updating
European Conference on Mobile Robots (ECMR), 2021