Embodied AI at LAMARR Institute for Machine Learning and Artificial Intelligence
The Lamarr Institute, emerging from the ML2R project after expert evaluation, is dedicated to advancing high-performance, reliable, and efficient Machine Learning and AI. Aiming to make Germany and Europe leaders in AI research, education, and technology transfer, it now enjoys permanent funding from the Federal Ministry of Education and Research and the state of North Rhine-Westphalia.
Project Abstract:
Embodied Artificial Intelligence refers to AI that is embedded in physical systems, such as robots, and can interact with the surroundings.
In contrast to classic ML in robotics, embodied AI encapsulates all aspects of interacting and learning in an environment: from perception, via understanding, reasoning, and planning to execution respectively manipulation. Just as human learning is based on exploration and interaction with the environment, embodied agents must improve their behavior from experience. Thus, embodied AI brings together multiple fields, such as computer vision, environment modeling, and prediction, planning, and control, reinforcement learning, physics-based simulation, and robotics.
Links:
Associated Researchers:






Associated Student Assistants:

B.Sc.
Lukas Kutsch
Student Assistant
Publications:
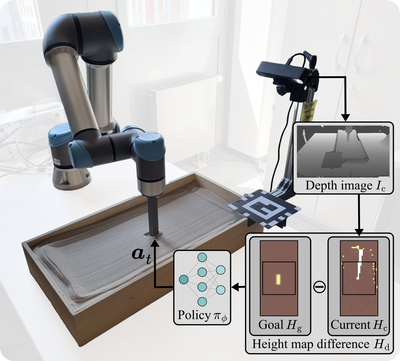
Interactive Shaping of Granular Media Using Reinforcement Learning
IEEE-RAS International Conference on Humanoid Robots (Humanoids), 2025
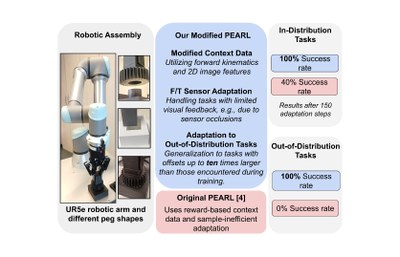
Context-Based Meta Reinforcement Learning for Robust and Adaptable Peg-in-Hole Assembly Tasks
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025
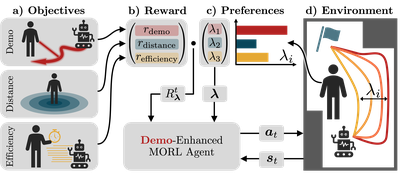
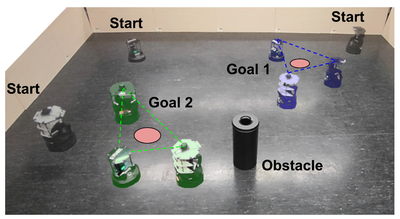
Demonstration-Enhanced Adaptable Multi-Objective Robot Navigation
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025

Learning Goal-Directed Object Pushing in Cluttered Scenes with Location-Based Attention
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025
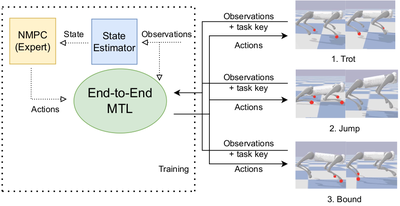
End-to-End Multi-Task Policy Learning from NMPC for Quadruped Locomotion
European Conference on Mobile Robots (ECMR), 2025
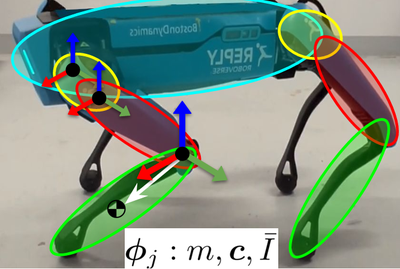
Physically-Consistent Parameter Identification of Robots in Contact
IEEE International Conference on Robotics & Automation (ICRA), 2025
Map Space Belief Prediction for Manipulation-Enhanced Mapping
Robotics: Science and Systems (RSS), 2025
Safe Multi-Agent Reinforcement Learning for Behavior-Based Cooperative Navigation
IEEE Robotics and Automation Letters (RA-L) and presented at the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025
A Dynamic Safety Shield for Safe and Efficient Reinforcement Learning of Navigation Tasks
Learning for Dynamics and Control (L4DC), 2025
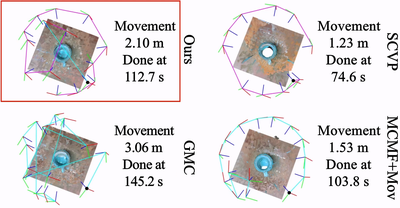
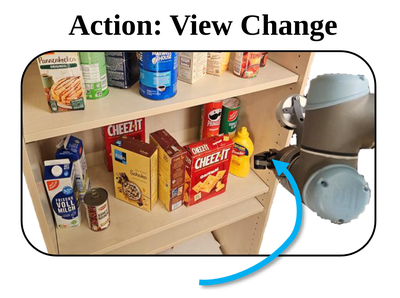
Integrating One-Shot View Planning with a Single Next-Best View via Long-Tail Multiview Sampling
IEEE Transactions on Robotics (T-RO), 2024
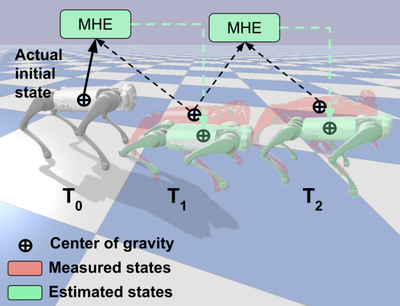
Centroidal State Estimation based on the Koopman Embedding for Dynamic Legged Locomotion
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024
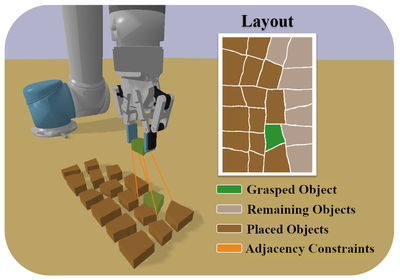
Compact Multi-Object Placement Using Adjacency-Aware Reinforcement Learning
IEEE-RAS International Conference on Humanoid Robots (Humanoids), 2024
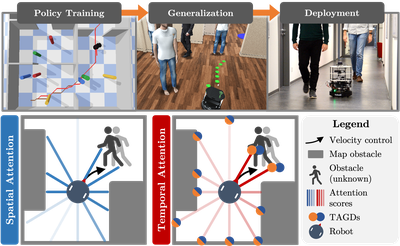
Spatiotemporal Attention Enhances Lidar-Based Robot Navigation in Dynamic Environments
IEEE Robotics and Automation Letters (RA-L), presented at the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024

Ensemble Policies for Diverse Query-Generation in Preference Alignment of Robot Navigation
IEEE International on Human & Robot Interactive Communication (RO-MAN), 2024
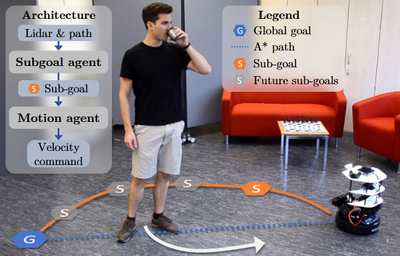
Subgoal-Driven Navigation in Dynamic Environments Using Attention-Based Deep Reinforcement Learning
IEEE International Conference on Advanced Robotics (ICAR), 2023

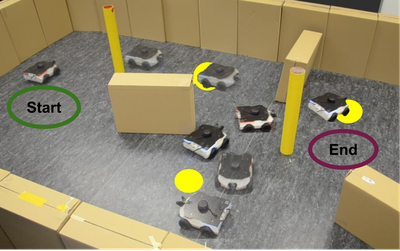
Viewpoint Push Planning for Mapping of Unknown Confined Spaces
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023

Learning Depth Vision-Based Personalized Robot Navigation From Dynamic Demonstrations in Virtual Reality
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023
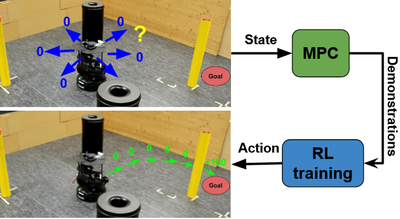
Handling Sparse Rewards in Reinforcement Learning Using Model Predictive Control
IEEE International Conference on Robotics & Automation (ICRA), 2023