Overview
Our research lies at the intersection of active perception, mobile manipulation, and human-robot interaction. We investigate how robots can actively gather task-relevant information from their surroundings, manipulate objects robustly in complex environments, and interact naturally with people during everyday tasks. Our work addresses challenges such as occlusions, uncertainty, and constrained manipulation in cluttered real-world environments, with applications in agricultural robotics, household assistance, and service robotics.

Our Robots:

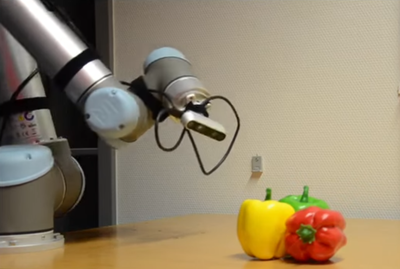
Robotic arms
... are often used in industry for more efficient workflows, and hence are a popular research topic. They can be used to grasp, move, or better observe objects from different angles.

Mobile Manipulator
… combines the best of both worlds. While the mobile robot can move through the environment, the arm can be used to manipulate objects and assist humans.
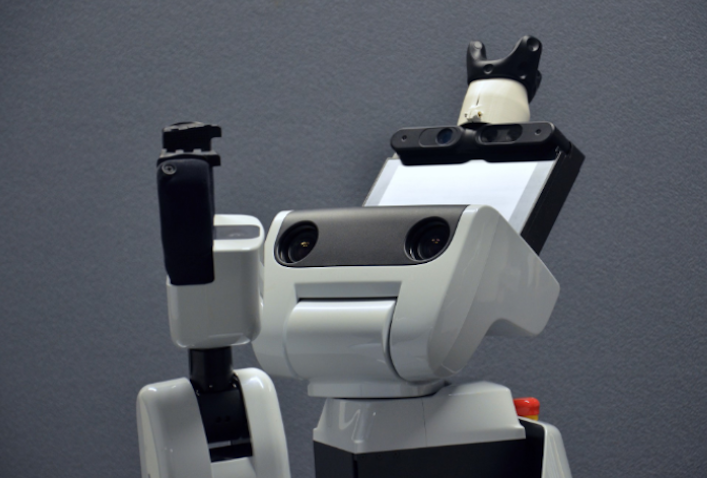
Human Support Robot
… is a service robot. with its mobile base, extensible torso, and compliant manipulation, it can robustly perform everyday assistance tasks such as object fetching and human–robot interaction

Unitree GO1
... an agile quadruped that is adept at walking, running, climbing across terrains. Ideal for robotics research, AI development, and automated surveillance applications, showcasing advanced locomotion and stability.

Unitree G1
… is a humanoid robot that is well suited for research and teaching; despite its compact form, it features highly dynamic whole-body motion, advanced manipulation with dexterous hands, and robust balance control, enabling complex tasks that can be transferred to real-world applications.

Dexterous 5-finger hand
... a cutting-edge bionic hand that closely mimics natural hand functionality. Equipped with sensory feedback, it enables the robot to feel touch, enhancing the manipulation experience. Built for durability and water resistance, it's well-suited for everyday use.
Research Areas:

Active Perception
Active perception tries to answer the question of where to look at to gain more information. This is an important task in any application where occlusions appear and scenes need to be observed from different angles. Especially for robots operating in complex unstructured environments, active perception is key to efficient spatio-temporal mapping.
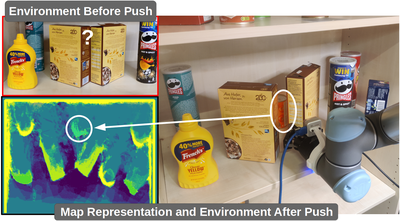
Intelligent Manipulation
In cluttered scenes, and with unknown objects, typical pick and place pipelines are sub-optimal. Assembly and rearrangement tasks require flexible manipulation modes using both prehensile and non-prehensile approaches with multimodal perception.

Motion Planning and Navigation in Dynamic Environments
With robots, be it mobile bases, quadrupeds, humanoids, or mobile manipulators, being deployed in unstructured and constantly changing environments, we focus on developing algorithms for online reactive motion planning and obstacle avoidance.

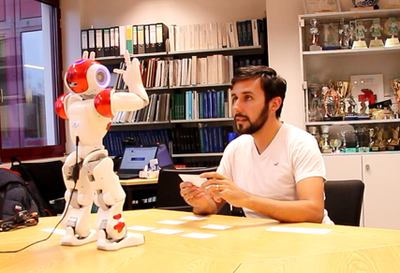
Personalized Human-Robot Interaction
When robots become assistants to humans, they need to not only be efficient and safe, but also be intuitive and explainable. Furthermore, they should adapt to the individual preferences of the user. We investigate methods to enable robots to anticipate human behavior, adapt to personal preferences, plan accordingly, and react to unforeseen changes in human actions in a natural manner.
Ongoing Projects:

Robotics Institute Germany
The Robotics Institute Germany is an initiative by the German Federal Ministry of Research, Technology and Space~(BMFTR) aimed at connecting leading robotics labs across Germany to enhance their international visibility, attract talent, and accelerate progress in AI-powered robotics.

Embodied AI at LAMARR Institute for Machine Learning and Artificial Intelligence
The Lamarr Institute, emerging from the ML2R project after expert evaluation, is dedicated to advancing high-performance, reliable, and efficient Machine Learning and AI. Aiming to make Germany and Europe leaders in AI research, education, and technology transfer, it now enjoys permanent funding from the Federal Ministry of Education and Research and the state of North Rhine-Westphalia.

Phenorob - Robotics and Phenotyping for Sustainable Crop Production
PhenoRob performs world-leading research in robotics and phenotyping for sustainable crop production. Our vision is to transform crop production by optimizing breeding and farming management through developing and deploying new technologies. PhenoRob addresses a real-world problem with a technology-oriented approach. Our scientists have backgrounds in computer science, geodesy, robotics, plant science, soil science, economics, and environmental science. This interdisciplinary team forms the only DFG-funded Cluster of Excellence focusing on agriculture.

RePAIR - Reconstructing the Past: Artificial Intelligence and Robotics Meet Cultural Heritage
The 'RePAIR' project combines Artificial Intelligence and Robotics with Cultural Heritage to create technology that simplifies the reconstruction of shattered artworks. This innovation aims to address the challenge of piecing together damaged or incomplete ancient artifacts like vases, amphorae, and frescoes, often found in fragments at excavation sites worldwide.

PRIVATAR - Privacy-friendly Mobile Avatars for Sick School Children
In order to promote the integration of acutely and chronically ill school children, the use of mobile robots as avatars at school offers a promising approach. Nevertheless, the robots, through their interactions and sensors, can endanger the different privacy dimensions of different people. PRIVATAR therefore aims to provide user-friendly solutions that allow users to better protect their privacy according to their own preferences through novel interactions. This gives them more control over their privacy, which goes far beyond the currently used consent forms.
AID4Crops - Automation and AI for Monitoring and Decision Making of Horticultural Crops
AID4Crops will bring together research about what can be sensed with what should be sensed. To do this, we will develop novel AI algorithms to enable autonomous monitoring (sensing) and management (forecasting and decision making) for horticultural crops. These approaches will be deployed in horticulture as it provides a set of realistic yet challenging environments with crops grown both indoors (in glasshouses) and outdoor (in orchards); the indoor environment provides greater control over the growth of the crops.
BNTrAinee - Bonn Transdisciplinary Training in Artificial Intelligence Behavior
The existing AI expertise in computer science is structurally networked with various specialist disciplines as users of AI as part of the project, so that demand-oriented teaching/learning opportunities are developed together. The teaching/learning opportunities are provided via a learning platform.

LAMARRacing – Autonomous Racing Research and Education at the HRL
LAMARRacing offers a hands-on platform for autonomous racing with 1:10-scale cars. Students at the HRL develop and test innovative control, planning, and perception methods, representing the University of Bonn in international RoboRacer competitions.
Previous Projects:
- Anticipating Human Behavior - This project aims to develop an integrated framework for predicting human behavior across multiple timescales and levels of detail, enabling accurate anticipation of both long-term activity patterns and short-term movements.
- SQUIRREL- Autonomous robots deployed in unstructured domestic settings, affecting navigation, manipulation, vision, human robot interaction and planning
- ROVINA- Robots for Exploration, Digital Preservation and Visualization of Archeological Sites
- First-MM- Flexible Skill Acquisition and Intuitive Robot Tasking for Mobile Manipulation
- SFB/TR8 Spatial Cognition- Trans-regional interdisciplinary collaborative research center on Spatial Cognition: Reasoning, Action, Interaction
- BrainLinks-BrainTools- Cluster of Excellence for basic research of the nervous system, the development of new materials and technical devices, and the implementation of customised robotics to face the challenge of connecting technical systems to the nervous system
- Embedded Microsystems- Research Training Group to integrate intelligent and communication-enabled units into everyday objects