Theses
Here is a list of current open Master or Bachelor Theses:
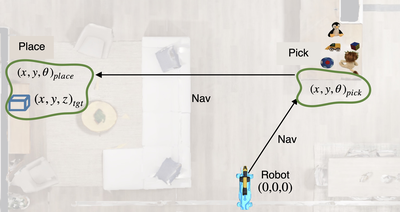
Mobile Manipulation for Rearrangement Tasks using Reinforcement and Imitation Learning
We are seeking a highly motivated Master’s student with a strong interest in Reinforcement Learning, Imitation Learning, and Robotics to undertake this thesis. The goal of this thesis is to investigate how recent advances in imitation learning, generative models, and offline reinforcement learning can be used to train policies for mobile manipulators performing rearrangement tasks in partially unknown environments. The thesis will focus on making effective use of demonstration data to learn policies that can generalize to new task settings and operate efficiently under uncertainty. By the end of the thesis, the student will gain hands-on experience in designing and tuning reinforcement learning agents, training generative multi-modal policies, and deploying learned policies on a real-world robotic platform.

Multi-Arm Viewpoint Planning for Pepper Peduncle Detection in Occluded Greenhouse Environments
We propose an innovative framework in which a three‑arm greenhouse robot employs coordinated active perception to first build a coarse understanding of pepper clusters and occlusion zones. Based on this preliminary model, the system dynamically plans arm trajectories—using either Task & Motion Planning or Reinforcement Learning—to optimize viewpoints, alternating between broad sweeps and close‑up inspections to uncover hidden peduncles. We hypothesize that this tight coupling of multi‑arm perception and adaptive planning will accelerate peduncle detection, minimize collision risks, and bolster the reliability of automated harvesting.

Consistency-Aware View Motion Planning for Fruit Mapping
We are seeking a highly motivated student to develop a Consistency-Aware View Motion Planner that eliminates 3D reconstruction "ghosting" caused by pose uncertainty in robotic fruit mapping. This involves integrating geometric redundancy constraints into the optimization framework, requiring a strong background in 3D perception and excellent C++, and ROS programming skills for real-world deployment.

Motion Planning in Constrained Environments
Robust motion planning for manipulation becomes significantly harder in constrained workspaces such as shelves and bins. The robot must move the arm through narrow passages while avoiding self-collisions and collisions with the environment, often with an attached object that changes the effective collision geometry. In such settings, different planning backends such as sampling-based, optimization-based, and GPU-accelerated motion generation exhibit distinct trade-offs in success rate, planning latency, and trajectory quality, particularly under clutter and narrow-passage conditions.