
Dr.
Jorge de Heuvel
Alumni
Contact:
Research Interest:
- Human-aware robot navigation
- Personalization of human-robot-interaction
- Reinforcement learning
Links:
About:
I am a research associate and Ph.D. student at the Humanoid Robots Lab. My work focuses on creating robots that can navigate safely and effectively in environments with humans, using advanced techniques like deep reinforcement learning. For instance, I have worked on improving robot navigation in dynamic environments using attention-based mechanisms and lidar sensors. This involves distinguishing between static and dynamic obstacles in a robot's environment and making navigation decisions accordingly. Another key area of his research is in developing methods for learning personalized robot navigation based on user demonstrations in virtual or augmented reality, which aims to align robot navigation policies with user preferences.
I am currently offering thesis opportunities for motivated students within the research areas mentioned above. If you are interested in a Bachelor or Master thesis, feel free to get in touch with me.
Research Areas:
Related Projects:
My Publications

Interpreting Context-Aware Human Preferences for Multi-Objective Robot Navigation
International Conference on Social Robotics (ICSR), 2026
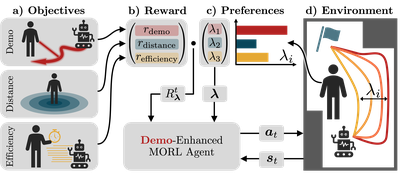
Demonstration-Enhanced Adaptable Multi-Objective Robot Navigation
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025
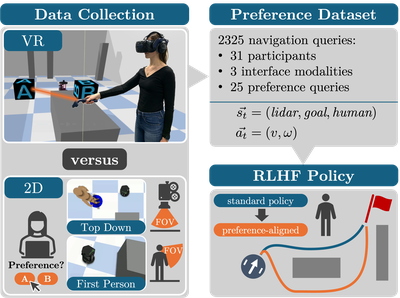
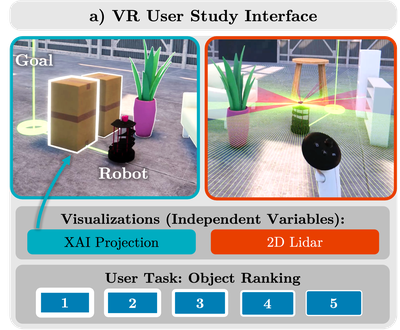
The Impact of VR and 2D Interfaces on Human Feedback in Preference-Based Robot Learning
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025
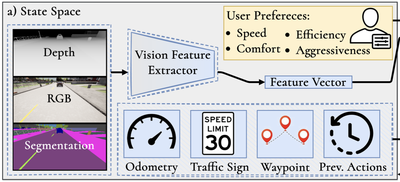
Multi-Objective Reinforcement Learning for Adaptive Personalized Autonomous Driving
European Conference on Mobile Robots (ECMR 2025), 2025
Immersive Explainability: Visualizing Robot Navigation Decisions through XAI Semantic Scene Projections in Virtual Reality
IEEE International on Human & Robot Interactive Communication (RO-MAN), 2025
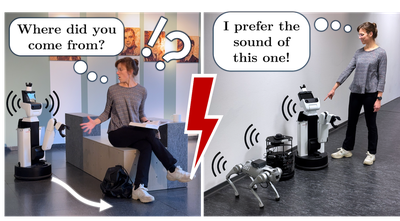
Auditory Localization and Assessment of Consequential Robot Sounds: A Multi-Method Study in Virtual Reality
IEEE International on Human & Robot Interactive Communication (RO-MAN), 2025
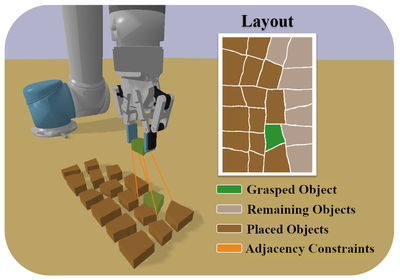
Compact Multi-Object Placement Using Adjacency-Aware Reinforcement Learning
IEEE-RAS International Conference on Humanoid Robots (Humanoids), 2024
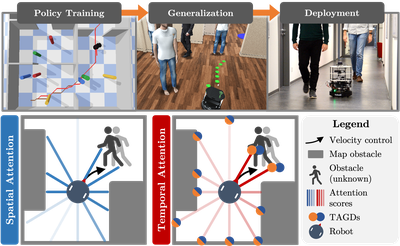
Spatiotemporal Attention Enhances Lidar-Based Robot Navigation in Dynamic Environments
IEEE Robotics and Automation Letters (RA-L), presented at the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024

Ensemble Policies for Diverse Query-Generation in Preference Alignment of Robot Navigation
IEEE International on Human & Robot Interactive Communication (RO-MAN), 2024

Sound Matters: Auditory Detectability of Mobile Robots
IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), 2024

RHINO-VR Experience: Teaching Mobile Robotics Concepts in an Interactive Museum Exhibit
IEEE International on Human & Robot Interactive Communication (RO-MAN), 2024
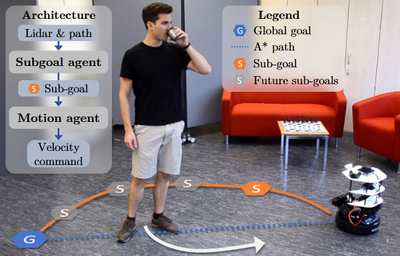
Subgoal-Driven Navigation in Dynamic Environments Using Attention-Based Deep Reinforcement Learning
IEEE International Conference on Advanced Robotics (ICAR), 2023

Learning Depth Vision-Based Personalized Robot Navigation From Dynamic Demonstrations in Virtual Reality
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023
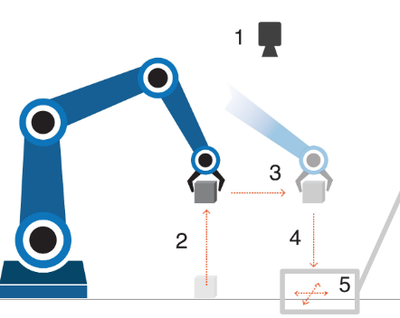
Reactive Correction of Object Placement Errors for Robotic Arrangement Tasks
International Conference on Intelligent Autonomous Systems (IAS-18), 2023
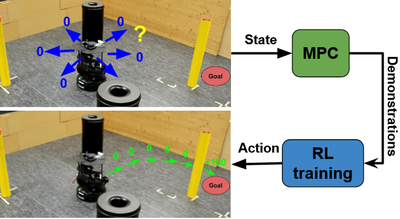
Handling Sparse Rewards in Reinforcement Learning Using Model Predictive Control
IEEE International Conference on Robotics & Automation (ICRA), 2023

Learning Personalized Human-Aware Robot Navigation Using Virtual Reality Demonstrations from a User Study
IEEE International on Human & Robot Interactive Communication (RO-MAN), 2022