Anticipating Human Behavior
This project focuses on creating technology for applications that predict human behavior. It covers a wide scope, including timeframes from milliseconds to hours and various levels of detail, from specific motions to general actions. The aim is to develop a comprehensive framework that doesn't isolate subproblems but integrates all aspects, allowing for accurate anticipation of human behavior, from long-term activity patterns to short-term detailed movements.

Project Abstract:
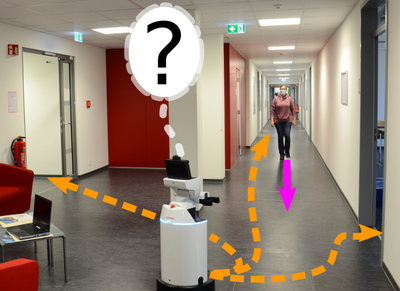
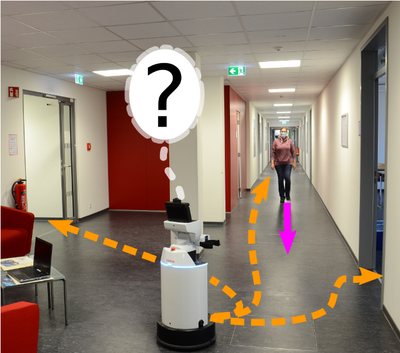
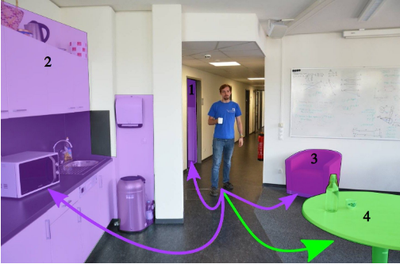
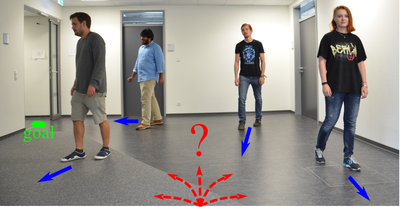
Assisting humans during everyday tasks is an important field of robotics. Possible tasks to be carried out by a service robot include support in sitting down or getting up, providing walking aids, fetching an object from an elevated board, or delivering objects. Whenever service robots are deployed in human environments, they have to adapt their behavior to the users. Planning appropriate actions in such environments requires to keep track of the user and to infer where, when, and for which tasks robot support is needed. Thus, to efficiently assist the user, a service robot must be able to anticipate the user’s intended navigation goals and trajectories. At the same time, the robot needs to navigate as well well as position itself in such a way that it is close to the user when help is requested while also minimizing interference with them. In the work planned within this proposal, we aim at developing a reliable prediction system for the user’s motions using a history of observations and predicting environment-specific trajectories. Furthermore, we plan to estimate where and when the help of the robot will actually be needed depending on anticipated user actions. Based on this knowledge, we will contribute new techniques to generate foresighted robot behavior. We will learn about user preferences and needs to realize foresighted service offering and optimize the robot’s behavior for user-aware positioning and navigation. We will thoroughly evaluate the developed techniques and compare them to state-of-the-art methods for human motion prediction and user-aware navigation. To conclude, the methods investigated in this project, will advance the area of user-aware navigation and foresighted service offering for assistance robots operating in human environments.
Links:
Project Members:
Associated Researchers:



Associated Student Assistants:

B.Sc.
Tharun Sethuraman
Thesis Student
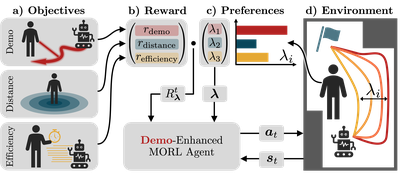
Demonstration-Enhanced Adaptable Multi-Objective Robot Navigation
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025
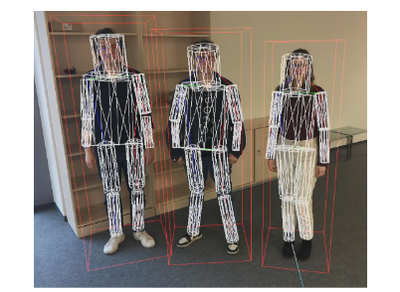
Towards Rhino-AR: A System for Real-Time 3D Human Pose Estimation and Volumetric Scene Integration on Embedded AR Headsets
International Conference on Virtual Reality (ICVR), 2025
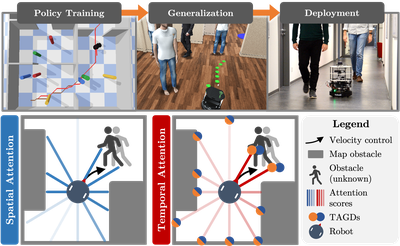
Spatiotemporal Attention Enhances Lidar-Based Robot Navigation in Dynamic Environments
IEEE Robotics and Automation Letters (RA-L), presented at the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024

Ensemble Policies for Diverse Query-Generation in Preference Alignment of Robot Navigation
IEEE International on Human & Robot Interactive Communication (RO-MAN), 2024

Sound Matters: Auditory Detectability of Mobile Robots
IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), 2024

RHINO-VR Experience: Teaching Mobile Robotics Concepts in an Interactive Museum Exhibit
IEEE International on Human & Robot Interactive Communication (RO-MAN), 2024
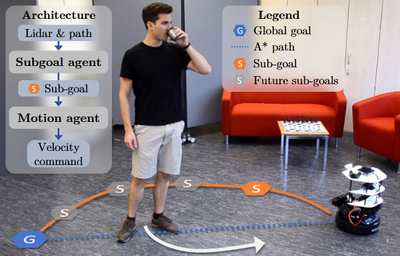
Subgoal-Driven Navigation in Dynamic Environments Using Attention-Based Deep Reinforcement Learning
IEEE International Conference on Advanced Robotics (ICAR), 2023

Learning Depth Vision-Based Personalized Robot Navigation From Dynamic Demonstrations in Virtual Reality
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023

Learning Personalized Human-Aware Robot Navigation Using Virtual Reality Demonstrations from a User Study
IEEE International on Human & Robot Interactive Communication (RO-MAN), 2022

Enhanced Spatial Attention Graph for Motion Planning in Crowded, Partially Observable Environments
IEEE International Conference on Robotics & Automation (ICRA), 2022
Human-Aware Robot Navigation Based on Learned Cost Values from User Studies
IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), 2021
Predicting Human Navigation Goals based on Bayesian Inference and Activity Regions.
Robotics and Autonomous Systems (RAS), 2020

Where Can I Help? Human-Aware Placement of Service Robots
Proceedings of the IEEE Conference on Robot and Human Interactive Communication (RO-MAN), 2020

Detection of Generic Human-Object Interactions in Video Streams
Proceedings of the International Conference on Social Robotics (ICSR), 2019

Human Motion Prediction Based on Object Interactions
Proceedings of the European Conference on Mobile Robots (ECMR), 2019
Improving Navigation with the Social Force Model by Learning a Neural Network Controller in Pedestrian Crowds
Proceedings of the European Conference on Mobile Robots (ECMR), 2019