Motion Planning and Navigation in Dynamic Environments
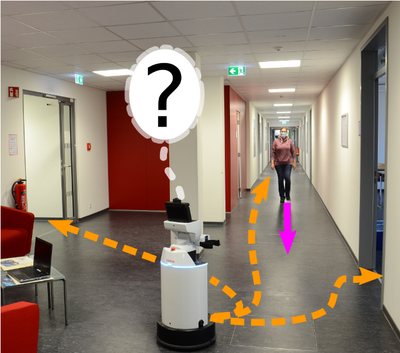
With robots, be it mobile bases, quadrupeds, humanoids, or mobile manipulators, being deployed in unstructured and constantly changing environments, we focus on developing algorithms for online reactive motion planning and obstacle avoidance.
Associated Researchers:






Related Projects:
Anticipating Human Behavior
This project focuses on creating technology for applications that predict human behavior. It covers a wide scope, including timeframes from milliseconds to hours and various levels of detail, from specific motions to general actions. The aim is to develop a comprehensive framework that doesn't isolate subproblems but integrates all aspects, allowing for accurate anticipation of human behavior, from long-term activity patterns to short-term detailed movements.

PRIVATAR - Privacy-friendly Mobile Avatars for Sick School Children
In order to promote the integration of acutely and chronically ill school children, the use of mobile robots as avatars at school offers a promising approach. Nevertheless, the robots, through their interactions and sensors, can endanger the different privacy dimensions of different people. PRIVATAR therefore aims to provide user-friendly solutions that allow users to better protect their privacy according to their own preferences through novel interactions. This gives them more control over their privacy, which goes far beyond the currently used consent forms.

Embodied AI at LAMARR Institute for Machine Learning and Artificial Intelligence
The Lamarr Institute, emerging from the ML2R project after expert evaluation, is dedicated to advancing high-performance, reliable, and efficient Machine Learning and AI. Aiming to make Germany and Europe leaders in AI research, education, and technology transfer, it now enjoys permanent funding from the Federal Ministry of Education and Research and the state of North Rhine-Westphalia.
Related Publications:
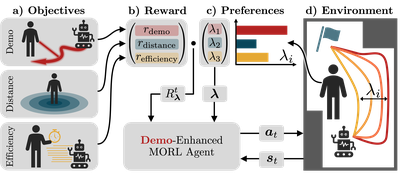
Demonstration-Enhanced Adaptable Multi-Objective Robot Navigation
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025
Safe Multi-Agent Reinforcement Learning for Behavior-Based Cooperative Navigation
IEEE Robotics and Automation Letters (RA-L) and presented at the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025
A Dynamic Safety Shield for Safe and Efficient Reinforcement Learning of Navigation Tasks
Learning for Dynamics and Control (L4DC), 2025
Evaluating Robot Influence on Pedestrian Behavior Models for Crowd Simulation and Benchmarking
International Conference on Social Robotics +AI (ICSR), 2024
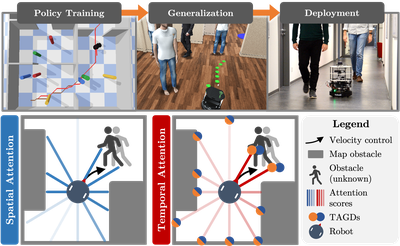
Spatiotemporal Attention Enhances Lidar-Based Robot Navigation in Dynamic Environments
IEEE Robotics and Automation Letters (RA-L), presented at the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024

Ensemble Policies for Diverse Query-Generation in Preference Alignment of Robot Navigation
IEEE International on Human & Robot Interactive Communication (RO-MAN), 2024
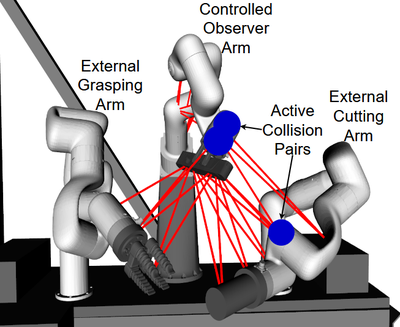
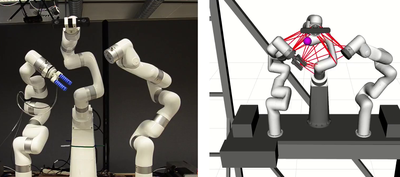
DawnIK: Decentralized Collision-Aware Inverse Kinematics Solver for Heterogeneous Multi-Arm Systems
IEEE-RAS International Conference on Humanoid Robots (Humanoids), 2023
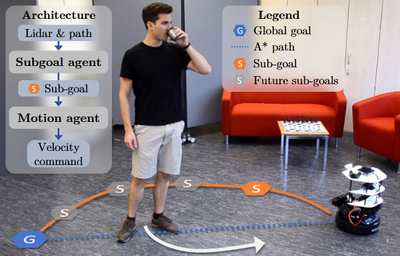
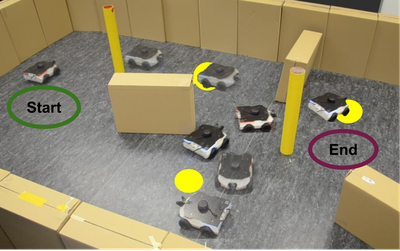
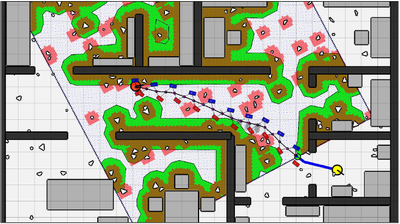
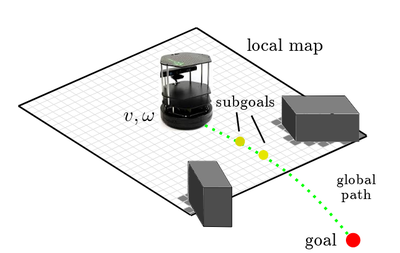
Subgoal-Driven Navigation in Dynamic Environments Using Attention-Based Deep Reinforcement Learning
IEEE International Conference on Advanced Robotics (ICAR), 2023

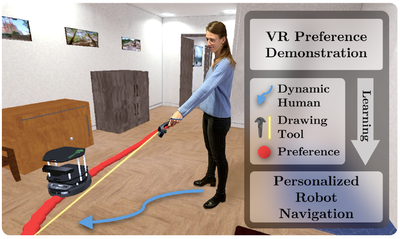
Learning Depth Vision-Based Personalized Robot Navigation From Dynamic Demonstrations in Virtual Reality
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023
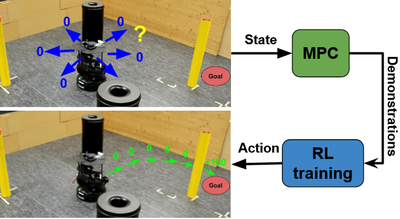
Handling Sparse Rewards in Reinforcement Learning Using Model Predictive Control
IEEE International Conference on Robotics & Automation (ICRA), 2023
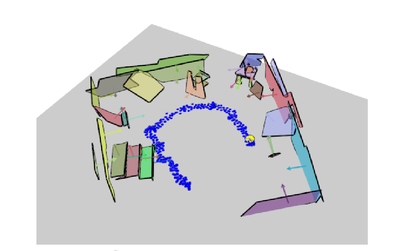
3D Polygonal Mapping for Humanoid Robot Navigation
IEEE-RAS International Conference on Humanoid Robots (Humanoids), 2022

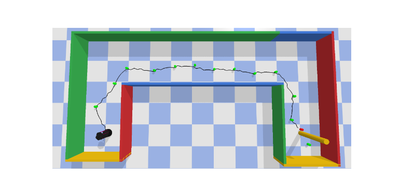
Fast-Replanning Motion Control for Non-Holonomic Vehicles with Aborted A*
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2022

Learning Personalized Human-Aware Robot Navigation Using Virtual Reality Demonstrations from a User Study
IEEE International on Human & Robot Interactive Communication (RO-MAN), 2022
Sensor-Based Navigation Using Hierarchical Reinforcement Learning
International Conference on Intelligent Autonomous Systems (IAS-17), 2022

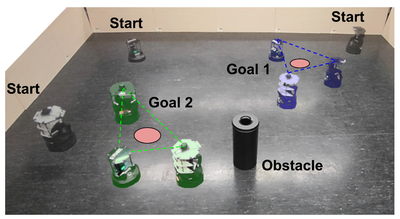
Enhanced Spatial Attention Graph for Motion Planning in Crowded, Partially Observable Environments
IEEE International Conference on Robotics & Automation (ICRA), 2022
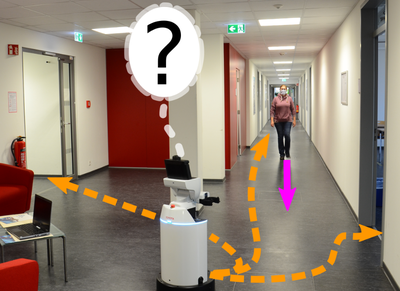
Human-Aware Robot Navigation Based on Learned Cost Values from User Studies
IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), 2021
Fast Footstep Planning with Aborting A*
IEEE International Conference on Robotics & Automation (ICRA), 2021
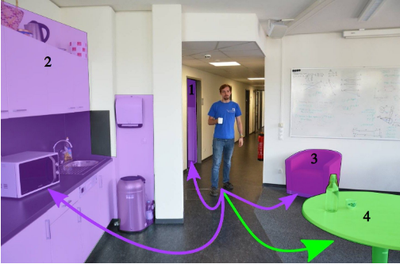
Predicting Human Navigation Goals based on Bayesian Inference and Activity Regions.
Robotics and Autonomous Systems (RAS), 2020
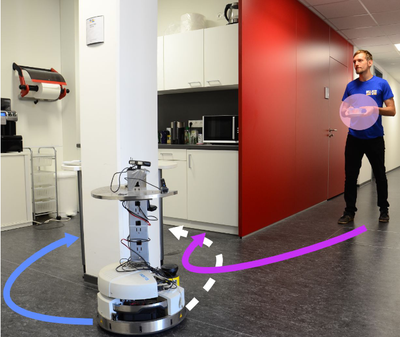
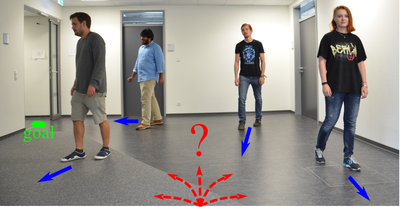
Human-Aware Robot Navigation by Long-Term Movement Prediction
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020
DEEP REINFORCEMENT LEARNING FOR NAVIGATION IN CLUTTERED ENVIRONMENTS
International Conference on Machine Learning and Applications (CMLA), 2020
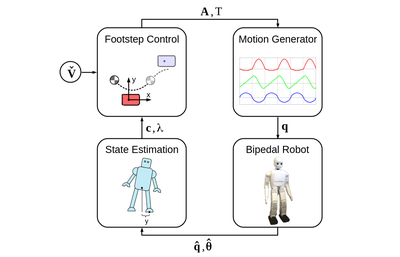
Capture Steps: Robust Walking for Humanoid Robots
International Journal of Humanoid Robotics (IJHR), 2020
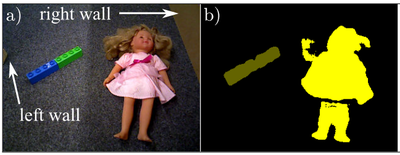
Classifying Obstacles and Exploiting Class Information for Humanoid Navigation through Cluttered Environments
nternational Journal of Humanoid Robotics (IJHR), 2020
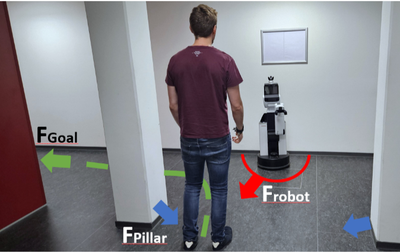
Improving Navigation with the Social Force Model by Learning a Neural Network Controller in Pedestrian Crowds
Proceedings of the European Conference on Mobile Robots (ECMR), 2019
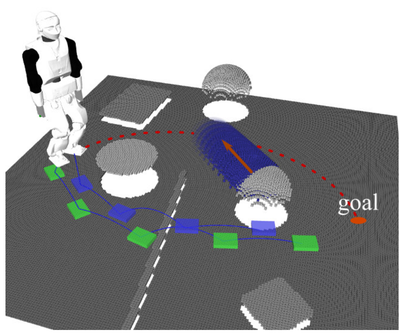
Prediction Maps for Real-Time 3D Footstep Planning in Dynamic Environments
Proceedings of the IEEE International Conference on Robotics & Automation (ICRA), 2019