
M.Sc.
Sicong Pan
Ph.D. Student
Contact:
Research Interest:
- 3D Object Reconstruciton
- View Planning
- Deep Learning and Coverage Optimization
Links:
Research Areas:
Related Projects:
My Publications:

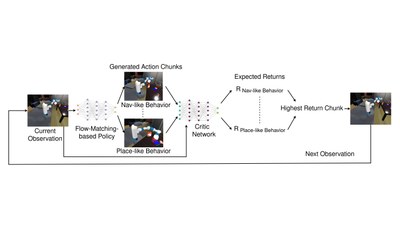
A Robust Placeability Metric for Model-Free Unified Pick-and-Place Reasoning
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2026
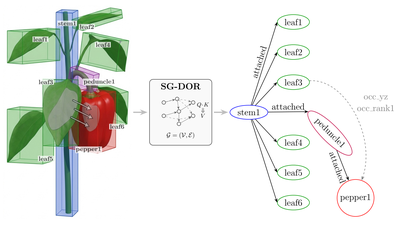
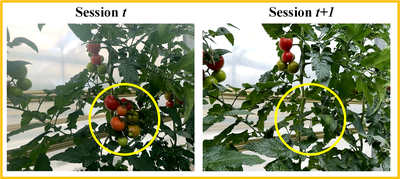
SG-DOR: Learning Scene Graphs with Direction-Conditioned Occlusion Reasoning for Pepper Plants
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2026

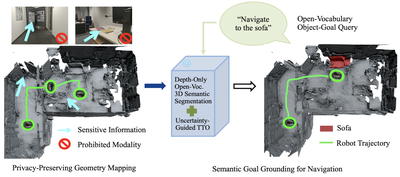
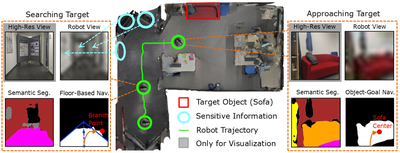
Designing Privacy-Preserving Visual Perception for Robot Navigation Based on User Privacy Preferences
IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), 2026
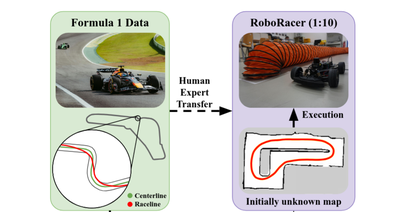
Efficient Trajectory Optimization for Autonomous Racing via Formula-1 Data-Driven Initialization
IEEE International Conference on Intelligent Transportation Systems (ITSC), 2026
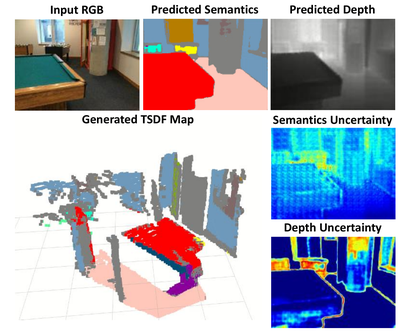
EvidMTL: Evidential Multi-Task Learning for Uncertainty-Aware Semantic Surface Mapping from Monocular RGB Images
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025
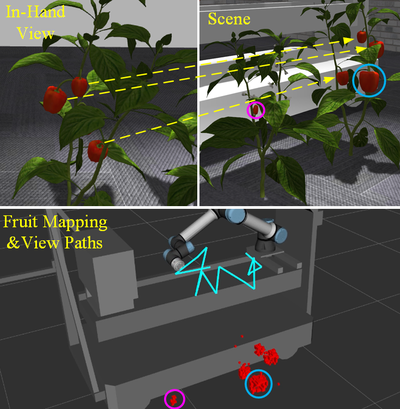
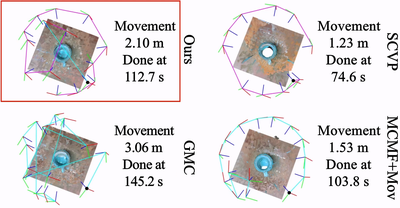
GO-VMP: Global Optimization for View Motion Planning in Fruit Mapping
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025
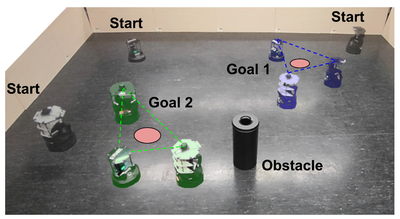
Safe Multi-Agent Reinforcement Learning for Behavior-Based Cooperative Navigation
IEEE Robotics and Automation Letters (RA-L) and presented at the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025
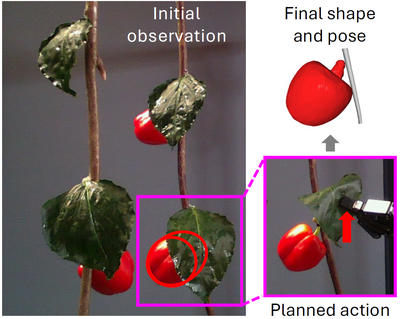
Safe Leaf Manipulation for Accurate Shape and Pose Estimation of Occluded Fruits
IEEE International Conference on Robotics & Automation (ICRA), 2025
Integrating One-Shot View Planning with a Single Next-Best View via Long-Tail Multiview Sampling
IEEE Transactions on Robotics (T-RO), 2024
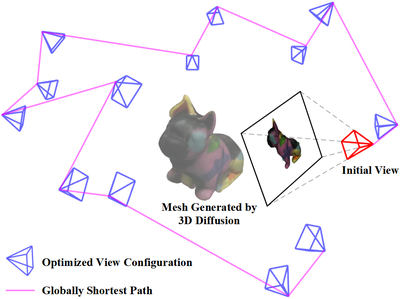
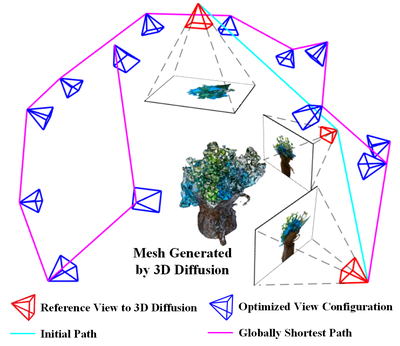
Exploiting Priors from 3D Diffusion Models for RGB-Based One-Shot View Planning
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024
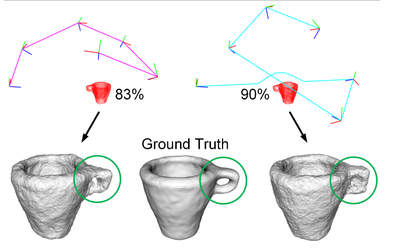
Active Implicit Reconstruction Using One-Shot View Planning
IEEE International Conference on Robotics and Automation (ICRA), 2024
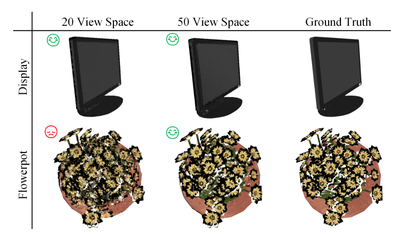
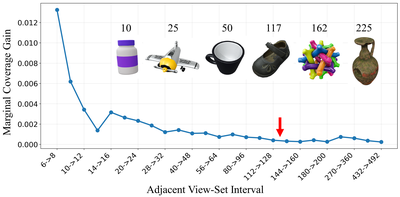
How Many Views Are Needed to Reconstruct an Unknown Object Using NeRF?
IEEE International Conference on Robotics and Automation (ICRA), 2024

Viewpoint Push Planning for Mapping of Unknown Confined Spaces
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023