AID4Crops - Automation and AI for Monitoring and Decision Making of Horticultural Crops
AID4Crops will bring together research about what can be sensed with what should be sensed. To do this, we will develop novel AI algorithms to enable autonomous monitoring (sensing) and management (forecasting and decision making) for horticultural crops. These approaches will be deployed in horticulture as it provides a set of realistic yet challenging environments with crops grown both indoors (in glasshouses) and outdoor (in orchards); the indoor environment provides greater control over the growth of the crops.

Project Abstract:
Long-term monitoring of horticultural crops is necessary to realize the forecasting of phenotypes and enable good management decisions. Autonomously, learning 3D models of crops is difficult due to their complex structure, occlusions that naturally occur, and deformation, or growth over time. Typically, multiple viewpoints are required to obtain relevant information of a crop, e.g., the position and shape of flowers, fruits, and the stem; furthermore, the sensing has to be carried out frequently to improve the phenotype forecast. Therefore, we will develop active sensing strategies to measure crops over their life cycle. We will provide methods to enable efficient sensing of relevant features and improve state-of-the-art next-best-view planners. We will make viewpoint planning efficient by considering the required regions of interest, which contain the relevant features for decision making. Furthermore, we will exploit prior information to speed up repeated coverage over time. We will use information about previously perceived crop parts and newly gained knowledge about significant features to speed up the coverage of relevant parts. Finally, we will optimize the sequence of the necessary viewpoints by trading off the cost of sensor data acquisition and the resulting reduced forecast uncertainty. To summarize, project IP3 will provide methods for efficiently obtaining relevant sensor data of horticultural crops and enable efficient decision making for necessary management actions in the other IPs.
Links:
Project Members:
Associated Researchers:


Associated Student Assistants:

B.Sc.
Moein Taherkhani
Student Assistant
Related Publications:
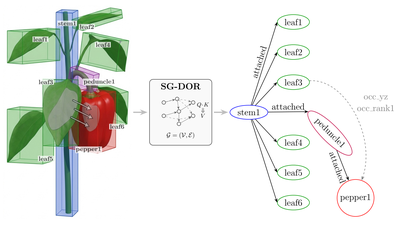
SG-DOR: Learning Scene Graphs with Direction-Conditioned Occlusion Reasoning for Pepper Plants
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2026

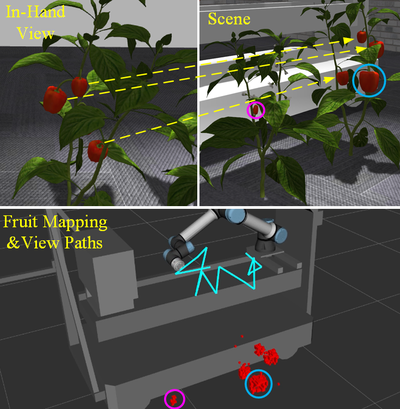
GO-VMP: Global Optimization for View Motion Planning in Fruit Mapping
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025
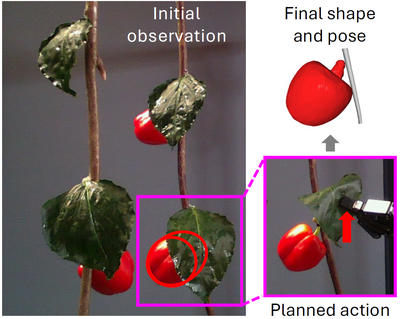
Safe Leaf Manipulation for Accurate Shape and Pose Estimation of Occluded Fruits
IEEE International Conference on Robotics & Automation (ICRA), 2025
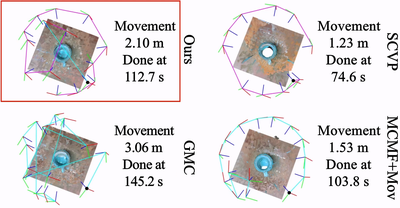
Integrating One-Shot View Planning with a Single Next-Best View via Long-Tail Multiview Sampling
IEEE Transactions on Robotics (T-RO), 2024
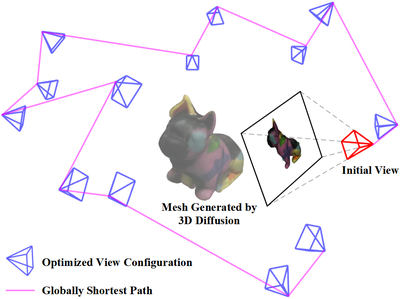
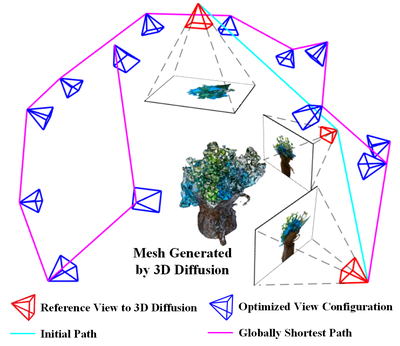
Exploiting Priors from 3D Diffusion Models for RGB-Based One-Shot View Planning
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024
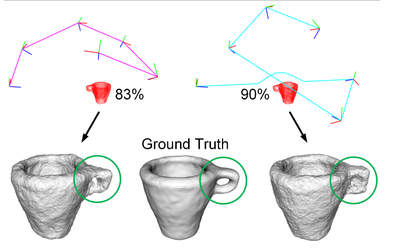
Active Implicit Reconstruction Using One-Shot View Planning
IEEE International Conference on Robotics and Automation (ICRA), 2024
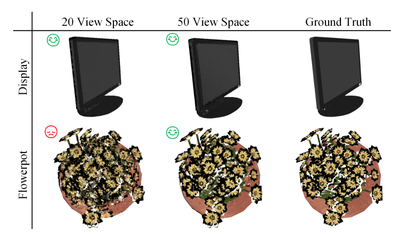
How Many Views Are Needed to Reconstruct an Unknown Object Using NeRF?
IEEE International Conference on Robotics and Automation (ICRA), 2024