
Dr.
Murad Dawood
Alumni
Contact:
Research Interest:
- Safe Reinforcement Learning
- Multi-Agent Reinforcement Learning
- Model Predictive Control
Links:
Research Areas:
Related Projects:
My Publications:
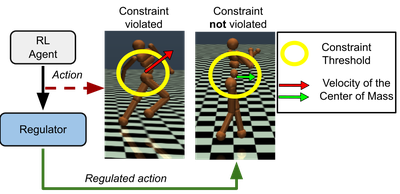
Constraint-Aware Reinforcement Learning via Adaptive Action Scaling
Learning for Dynamics & Control Conference (L4DC), 2026
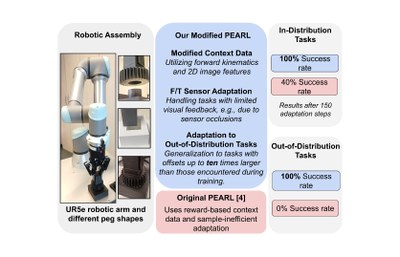
Context-Based Meta Reinforcement Learning for Robust and Adaptable Peg-in-Hole Assembly Tasks
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025
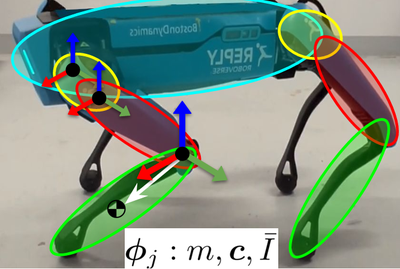
Physically-Consistent Parameter Identification of Robots in Contact
IEEE International Conference on Robotics & Automation (ICRA), 2025
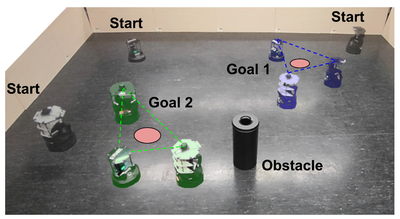
Safe Multi-Agent Reinforcement Learning for Behavior-Based Cooperative Navigation
IEEE Robotics and Automation Letters (RA-L) and presented at the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025
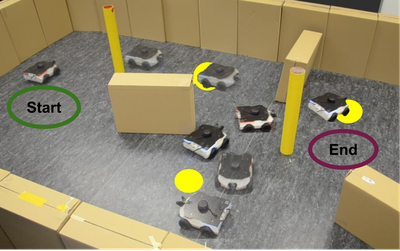
A Dynamic Safety Shield for Safe and Efficient Reinforcement Learning of Navigation Tasks
Learning for Dynamics and Control (L4DC), 2025
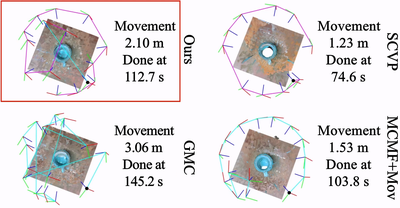
Integrating One-Shot View Planning with a Single Next-Best View via Long-Tail Multiview Sampling
IEEE Transactions on Robotics (T-RO), 2024
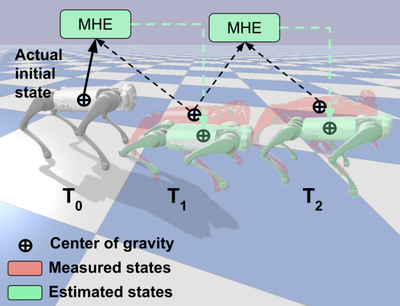
Centroidal State Estimation based on the Koopman Embedding for Dynamic Legged Locomotion
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024

Viewpoint Push Planning for Mapping of Unknown Confined Spaces
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023
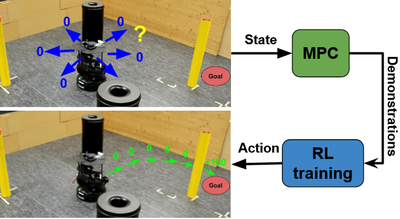
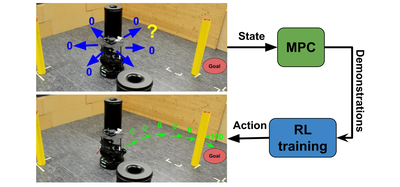
Handling Sparse Rewards in Reinforcement Learning Using Model Predictive Control
IEEE International Conference on Robotics & Automation (ICRA), 2023