
M.Sc.
Shahram Khorshidi
Ph.D. Student
Contact:
Research Interest:
- Optimization in legged robots locomotion
- MPC and system identification
- State estimation and SLAM
Links:
About:
I am a research associate and Ph.D. student at the Humanoid Robots Lab, specializing in dynamic locomotion, state estimation, and SLAM for legged robots. My primary focus lies in system identification and understanding dynamics to develop adaptive control frameworks. Leveraging methods such as MPC and machine learning, I design advanced control strategies for robot locomotion and navigation across diverse environments. My work involves rigorous testing of these methodologies on real-world robotic platforms, integrating dynamic insights with cutting-edge control approaches to enhance adaptability and performance.
Research Areas:
My Publications:
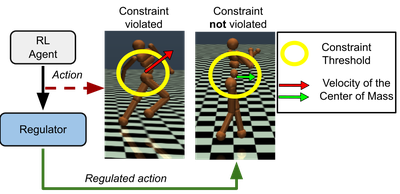
Constraint-Aware Reinforcement Learning via Adaptive Action Scaling
Learning for Dynamics & Control Conference (L4DC), 2026
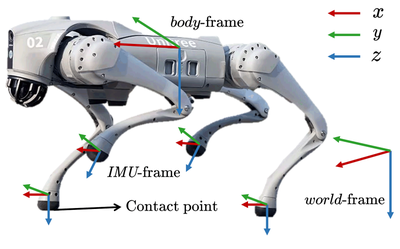
DogLegs: Robust Proprioceptive State Estimation for Legged Robots Using Multiple Leg-Mounted IMUs
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025
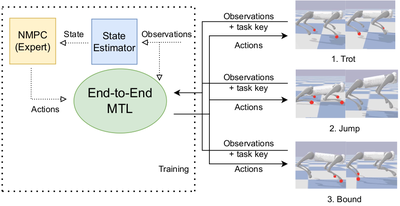
End-to-End Multi-Task Policy Learning from NMPC for Quadruped Locomotion
European Conference on Mobile Robots (ECMR), 2025
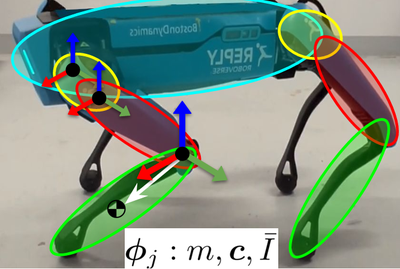
Physically-Consistent Parameter Identification of Robots in Contact
IEEE International Conference on Robotics & Automation (ICRA), 2025
Centroidal State Estimation based on the Koopman Embedding for Dynamic Legged Locomotion
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024


On the Use of Torque Measurement in Centroidal State Estimation
IEEE International Conference on Robotics & Automation (ICRA), 2023