Research
Active Perception
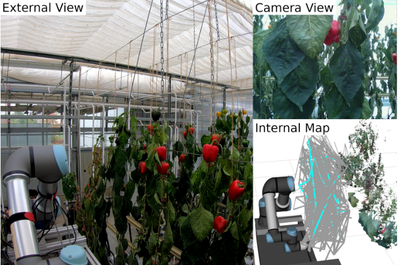
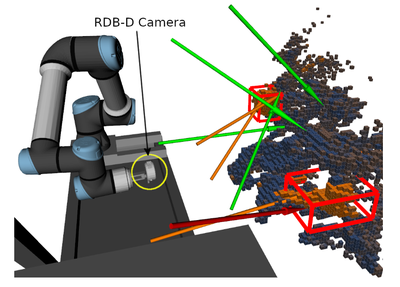
Active perception tries to answer the question of where to look at to gain more information. This is an important task in any application where occlusions appear and scenes need to be observed from different angles. Especially for robots operating in complex unstructured environments, active perception is key to efficient spatio-temporal mapping.

Associated Researchers



Related Projects:

Phenorob - Robotics and Phenotyping for Sustainable Crop Production
PhenoRob performs world-leading research in robotics and phenotyping for sustainable crop production. Our vision is to transform crop production by optimizing breeding and farming management through developing and deploying new technologies. PhenoRob addresses a real-world problem with a technology-oriented approach. Our scientists have backgrounds in computer science, geodesy, robotics, plant science, soil science, economics, and environmental science. This interdisciplinary team forms the only DFG-funded Cluster of Excellence focusing on agriculture.
AID4Crops - Automation and AI for Monitoring and Decision Making of Horticultural Crops
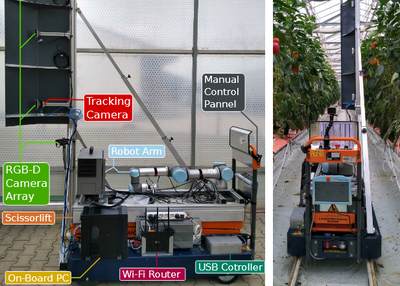
AID4Crops will bring together research about what can be sensed with what should be sensed. To do this, we will develop novel AI algorithms to enable autonomous monitoring (sensing) and management (forecasting and decision making) for horticultural crops. These approaches will be deployed in horticulture as it provides a set of realistic yet challenging environments with crops grown both indoors (in glasshouses) and outdoor (in orchards); the indoor environment provides greater control over the growth of the crops.
Related Publications:
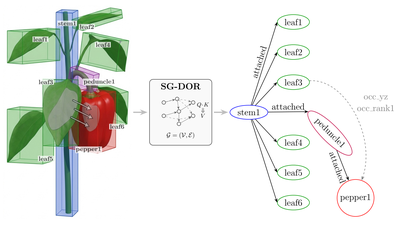
SG-DOR: Learning Scene Graphs with Direction-Conditioned Occlusion Reasoning for Pepper Plants
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2026
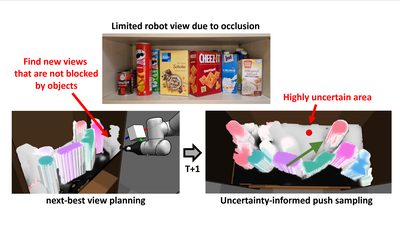
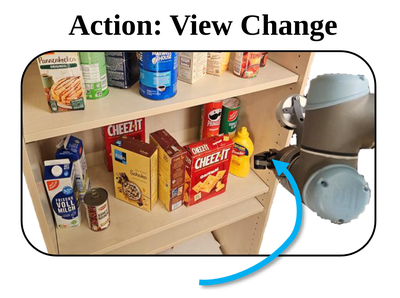
Efficient Manipulation-Enhanced Semantic Mapping With Uncertainty-Informed Action Selection
IEEE/RAS International Conference on Humanoid Robots (Humanoids), 2025
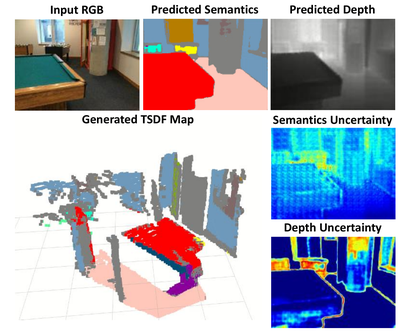
EvidMTL: Evidential Multi-Task Learning for Uncertainty-Aware Semantic Surface Mapping from Monocular RGB Images
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025
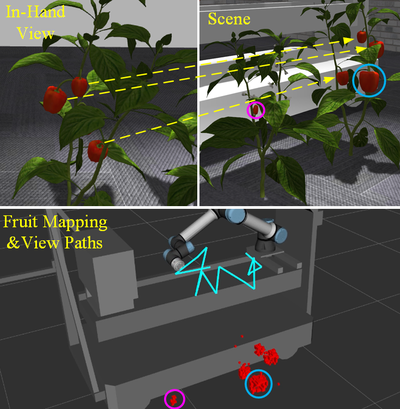
GO-VMP: Global Optimization for View Motion Planning in Fruit Mapping
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025
Map Space Belief Prediction for Manipulation-Enhanced Mapping
Robotics: Science and Systems (RSS), 2025
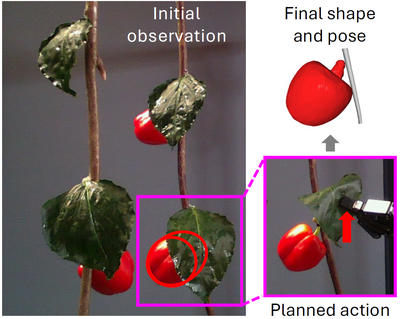
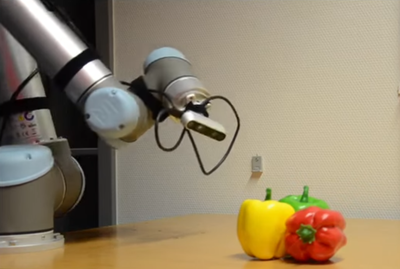
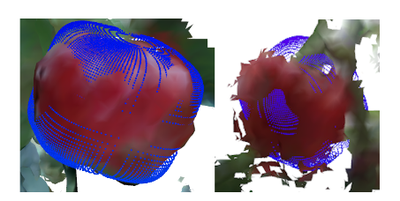
Safe Leaf Manipulation for Accurate Shape and Pose Estimation of Occluded Fruits
IEEE International Conference on Robotics & Automation (ICRA), 2025
Integrating One-Shot View Planning with a Single Next-Best View via Long-Tail Multiview Sampling
IEEE Transactions on Robotics (T-RO), 2024
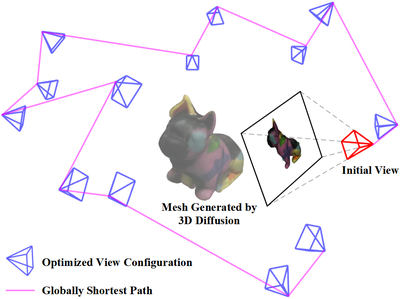
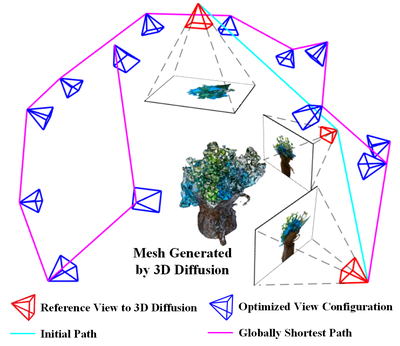
Exploiting Priors from 3D Diffusion Models for RGB-Based One-Shot View Planning
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024

HortiBot: An Adaptive Multi-Arm System for Robotic Horticulture of Sweet Peppers
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024
Active Implicit Reconstruction Using One-Shot View Planning
IEEE International Conference on Robotics and Automation (ICRA), 2024
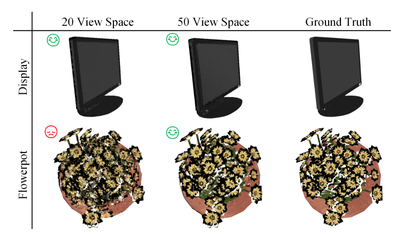
How Many Views Are Needed to Reconstruct an Unknown Object Using NeRF?
IEEE International Conference on Robotics and Automation (ICRA), 2024


Viewpoint Push Planning for Mapping of Unknown Confined Spaces
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023

NBV-SC: Next Best View Planning based on Shape Completion for Fruit Mapping and Reconstruction
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023
Graph-based View Motion Planning for Fruit Detection
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023
Fruit Mapping with Shape Completion for Autonomous Crop Monitoring
IEEE International Conference on Automation Science and Engineering (CASE), 2022

Deep Reinforcement Learning for Next-Best-View Planning in Agricultural Applications
IEEE International Conference on Robotics & Automation (ICRA), 2022
Combining Local and Global Viewpoint Planning for Fruit Coverage
European Conference on Mobile Robots (ECMR), 2021

Online Object-Oriented Semantic Mapping and Map Updating
European Conference on Mobile Robots (ECMR), 2021
Viewpoint Planning for Fruit Size and Position Estimation
Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021
PATHoBot: A Robot for Glasshouse Crop Phenotyping and Intervention.
IEEE International Conference on Robotics & Automation (ICRA), 2021
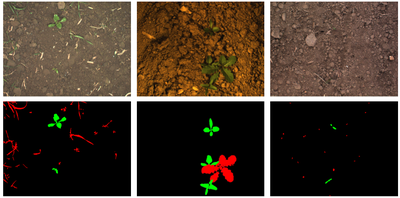
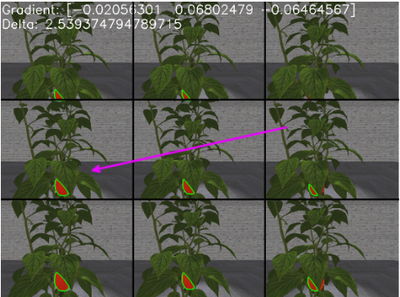
Gradient and Log-based Active Learning for Semantic Segmentation of Crop and Weed for Agricultural Robots
Proceedings of the IEEE International Conference on Robotics & Automation (ICRA), 2020

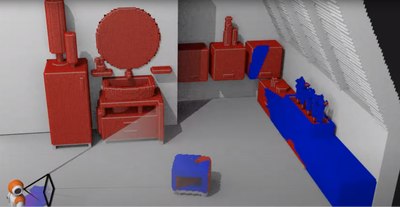
GPU-Accelerated Next-Best-View Exploration of Articulated Scenes
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2018