PATHoBot: A Robot for Glasshouse Crop Phenotyping and Intervention.
Abstract:
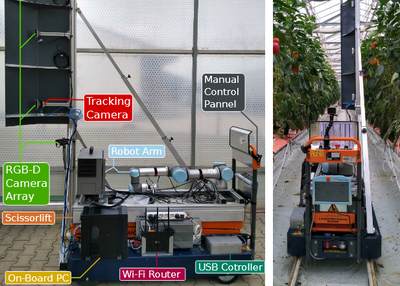
We present PATHoBot an autonomous crop surveying and intervention robot for glasshouse environments. The aim of this platform is to autonomously gather high quality data and also estimate key phenotypic parameters. To achieve this we retro-fit an off-the-shelf pipe-rail trolley with an array of multi-modal cameras, navigation sensors and a robotic arm for close surveying tasks and intervention. In this paper we describe PATHoBot design choices made to ensure proper operation in a commercial glasshouse environment. As a surveying platform we collect a number of datasets which include both sweet pepper and tomatoes. We show how PATHoBot enables novel surveillance approaches by first improving our previous work on fruit counting by incorporating wheel odometry and depth information. We find that by introducing re-projection and depth information we are able to achieve an absolute improvement of 20 points over the baseline technique in an "in the wild" situation. Finally, we present a 3D mapping case study, further showcasing PATHoBot's crop surveying capabilities.