Graph-based View Motion Planning for Fruit Detection
Abstract:
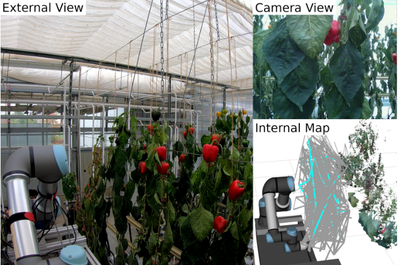
Crop monitoring is crucial for maximizing agricultural productivity and efficiency. However, monitoring large and complex structures such as sweet pepper plants presents significant challenges, especially due to frequent occlusions of the fruits. Traditional next-best view planning can lead to unstructured and inefficient coverage of the crops. To address this, we propose a novel view motion planner that builds a graph network of viable view poses and trajectories between nearby poses, thereby considering robot motion constraints. The planner searches the graphs for view sequences with the highest accumulated information gain, allowing for efficient pepper plant monitoring while minimizing occlusions. The generated view poses aim at both sufficiently covering already detected and discovering new fruits. The graph and the corresponding best view pose sequence are computed with a limited horizon and are adaptively updated in fixed time intervals as the system gathers new information. We demonstrate the effectiveness of our approach through simulated and real-world experiments using a robotic arm equipped with an RGB-D camera and mounted on a trolley. As the experimental results show, our planner produces view pose sequences to systematically cover the crops and leads to increased fruit coverage when given a limited time in comparison to a state-of-the-art single next-best view planner.