
Neuroswarm: Multi-agent neural 3d scene reconstruction and segmentation with uav for optimal navigation of quadruped robot
IEEE International Conference on Systems, Man, and Cybernetics (SMC), 2023

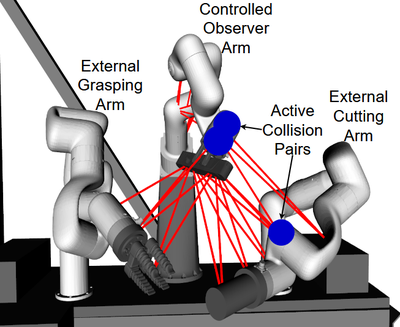
DawnIK: Decentralized Collision-Aware Inverse Kinematics Solver for Heterogeneous Multi-Arm Systems
IEEE-RAS International Conference on Humanoid Robots (Humanoids), 2023
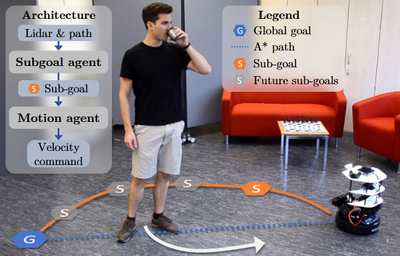
Subgoal-Driven Navigation in Dynamic Environments Using Attention-Based Deep Reinforcement Learning
IEEE International Conference on Advanced Robotics (ICAR), 2023
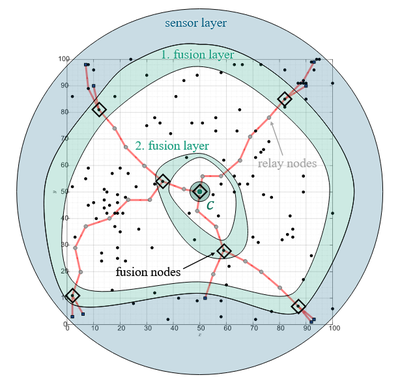
Self-Organizing Distributed Sensor Fusion Networks for Hierarchical Swarm Control and Supervision
IEEE Symposium Sensor Data Fusion and International Conference on Multisensor Fusion and Integration (SDF-MFI), 2023

Viewpoint Push Planning for Mapping of Unknown Confined Spaces
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023

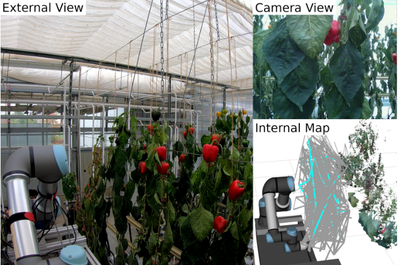
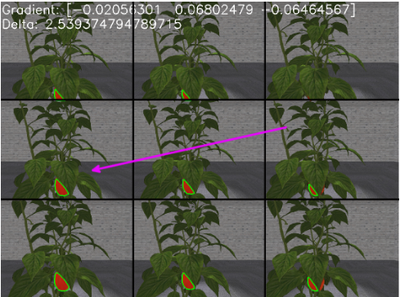
NBV-SC: Next Best View Planning based on Shape Completion for Fruit Mapping and Reconstruction
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023
Graph-based View Motion Planning for Fruit Detection
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023

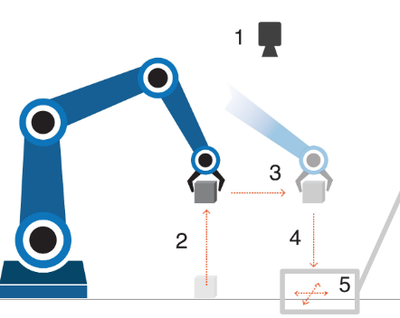
Learning Depth Vision-Based Personalized Robot Navigation From Dynamic Demonstrations in Virtual Reality
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023
Reactive Correction of Object Placement Errors for Robotic Arrangement Tasks
International Conference on Intelligent Autonomous Systems (IAS-18), 2023
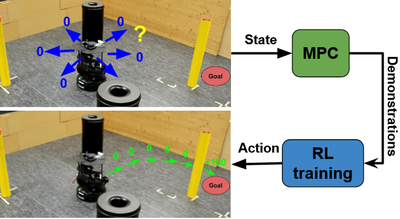
Handling Sparse Rewards in Reinforcement Learning Using Model Predictive Control
IEEE International Conference on Robotics & Automation (ICRA), 2023
Fruit Tracking Over Time Using High-Precision Point Clouds
IEEE International Conference on Robotics & Automation (ICRA), 2023

On the Use of Torque Measurement in Centroidal State Estimation
IEEE International Conference on Robotics & Automation (ICRA), 2023