Predicting Human Navigation Goals based on Bayesian Inference and Activity Regions.
Robotics and Autonomous Systems (RAS), 2020

Polygonal Perception for Mobile Robots
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020
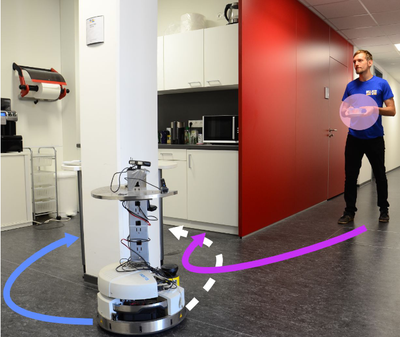
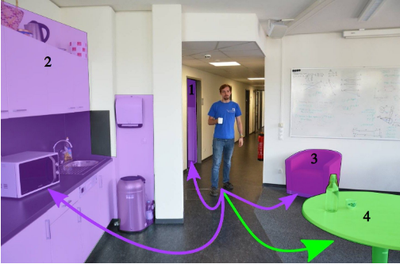
Human-Aware Robot Navigation by Long-Term Movement Prediction
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020
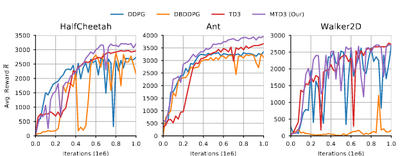
Penalized Bootstrapping for Reinforcement Learning in Robot Control.
International Conference on Machine Learning and Applications (CMLA), 2020
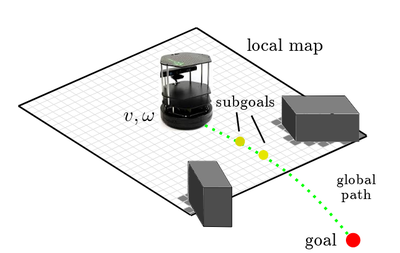
DEEP REINFORCEMENT LEARNING FOR NAVIGATION IN CLUTTERED ENVIRONMENTS
International Conference on Machine Learning and Applications (CMLA), 2020

Where Can I Help? Human-Aware Placement of Service Robots
Proceedings of the IEEE Conference on Robot and Human Interactive Communication (RO-MAN), 2020

On the Importance of Adaptive Operator Training in Human-Swarm Interaction
Proceedings of the International Conference on Human-Computer Interaction (HCII), 2020
Robots in Education: Influence on Learning Experience and Design Considerations
Proceedings of the European Conference on Education (ECE), 2020
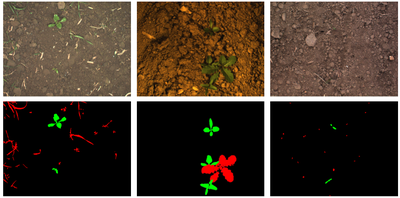
Gradient and Log-based Active Learning for Semantic Segmentation of Crop and Weed for Agricultural Robots
Proceedings of the IEEE International Conference on Robotics & Automation (ICRA), 2020
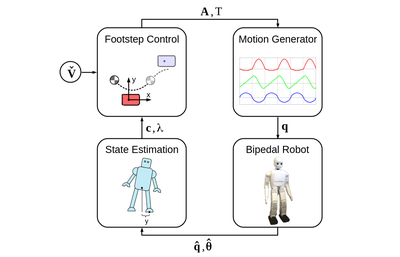
Capture Steps: Robust Walking for Humanoid Robots
International Journal of Humanoid Robotics (IJHR), 2020
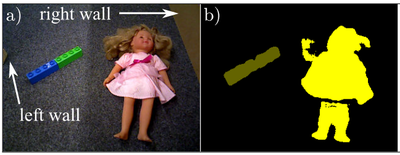
Classifying Obstacles and Exploiting Class Information for Humanoid Navigation through Cluttered Environments
nternational Journal of Humanoid Robotics (IJHR), 2020