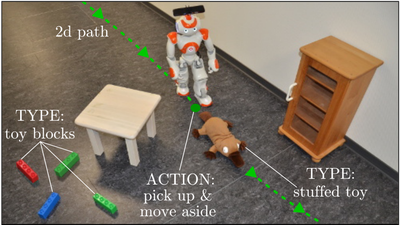
Classifying Obstacles and Exploiting Knowledge about Classes for Efficient Humanoid Navigation
IEEE-RAS International Conference on Humanoid Robots (Humanoids), 2018

GPU-Accelerated Next-Best-View Exploration of Articulated Scenes
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2018

Minimal Construct: Efficient Shortest Path Finding for Mobile Robots in Polygonal Maps
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2018

A Combined RGB and Depth Descriptor for SLAM with Humanoids
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2018
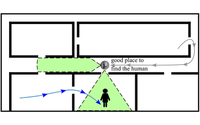
People Finding under Visibility Constraints using Graph-Based Motion Prediction
International Conference on Intelligent Autonomous Systems, 2018