An Approach to Joint Hybrid Decision Making Between Humans and Artificial Intelligence
Studies in Neuroscience, Psychology and Behavioral Economics (SNPBE), 2025
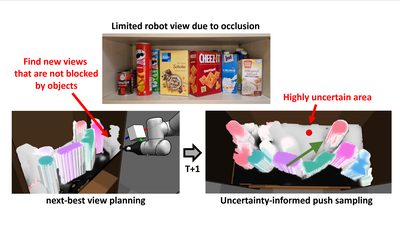
Efficient Manipulation-Enhanced Semantic Mapping With Uncertainty-Informed Action Selection
IEEE/RAS International Conference on Humanoid Robots (Humanoids), 2025
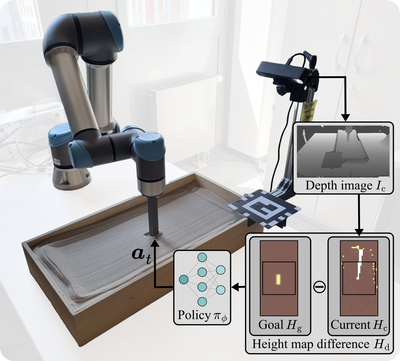
Interactive Shaping of Granular Media Using Reinforcement Learning
IEEE-RAS International Conference on Humanoid Robots (Humanoids), 2025
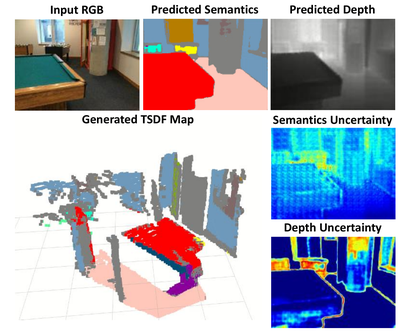
EvidMTL: Evidential Multi-Task Learning for Uncertainty-Aware Semantic Surface Mapping from Monocular RGB Images
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025
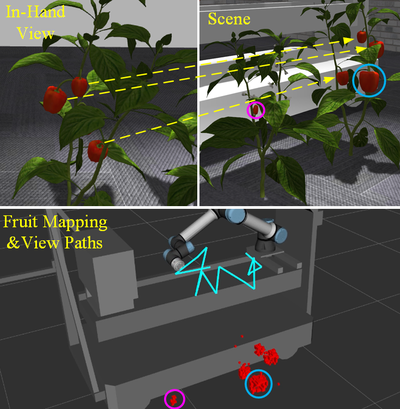
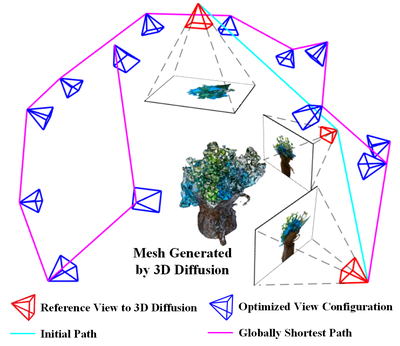
GO-VMP: Global Optimization for View Motion Planning in Fruit Mapping
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025
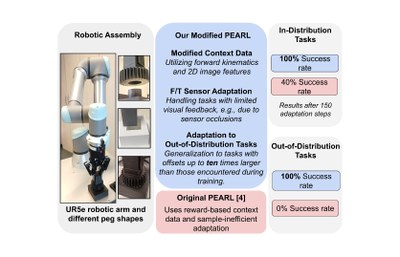
Context-Based Meta Reinforcement Learning for Robust and Adaptable Peg-in-Hole Assembly Tasks
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025
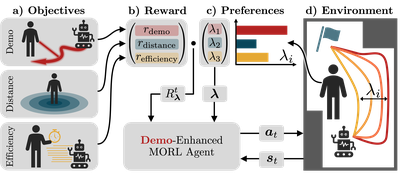
Demonstration-Enhanced Adaptable Multi-Objective Robot Navigation
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025
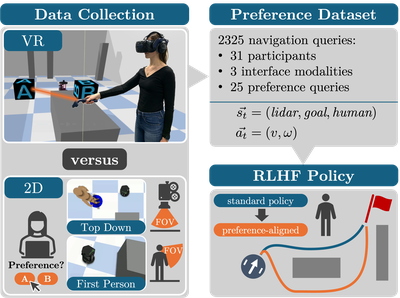
The Impact of VR and 2D Interfaces on Human Feedback in Preference-Based Robot Learning
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025

Learning Goal-Directed Object Pushing in Cluttered Scenes with Location-Based Attention
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025
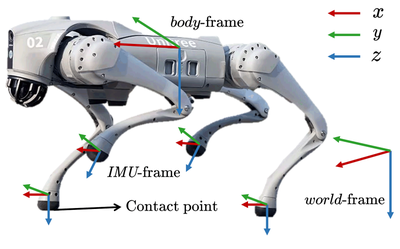
DogLegs: Robust Proprioceptive State Estimation for Legged Robots Using Multiple Leg-Mounted IMUs
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025
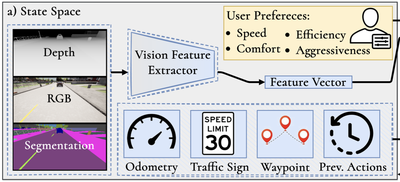
Multi-Objective Reinforcement Learning for Adaptive Personalized Autonomous Driving
European Conference on Mobile Robots (ECMR 2025), 2025
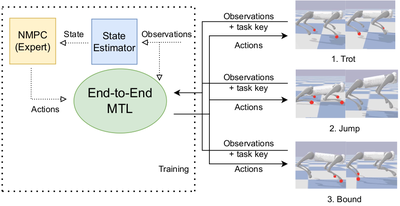
End-to-End Multi-Task Policy Learning from NMPC for Quadruped Locomotion
European Conference on Mobile Robots (ECMR), 2025
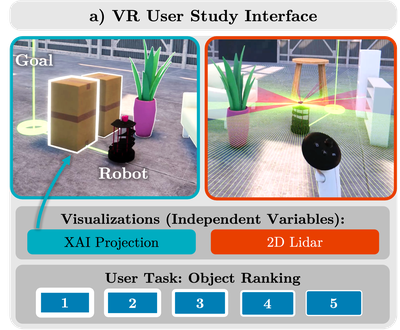
Immersive Explainability: Visualizing Robot Navigation Decisions through XAI Semantic Scene Projections in Virtual Reality
IEEE International on Human & Robot Interactive Communication (RO-MAN), 2025
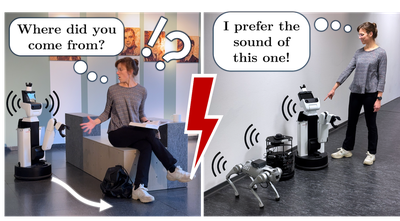
Auditory Localization and Assessment of Consequential Robot Sounds: A Multi-Method Study in Virtual Reality
IEEE International on Human & Robot Interactive Communication (RO-MAN), 2025
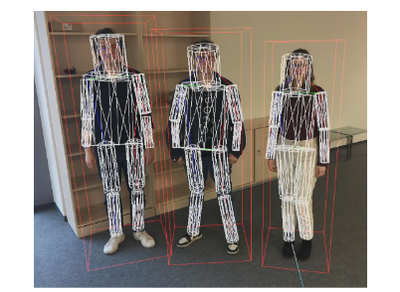
Towards Rhino-AR: A System for Real-Time 3D Human Pose Estimation and Volumetric Scene Integration on Embedded AR Headsets
International Conference on Virtual Reality (ICVR), 2025
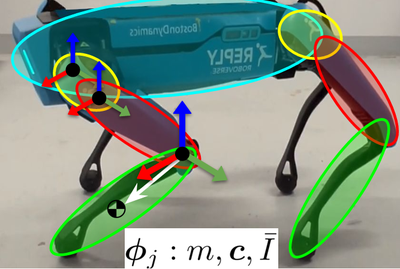
Physically-Consistent Parameter Identification of Robots in Contact
IEEE International Conference on Robotics & Automation (ICRA), 2025
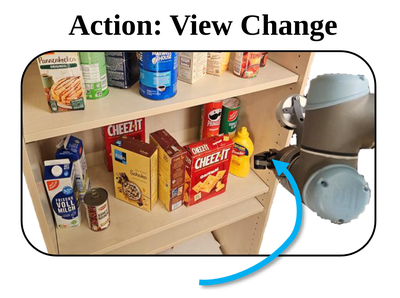
Map Space Belief Prediction for Manipulation-Enhanced Mapping
Robotics: Science and Systems (RSS), 2025
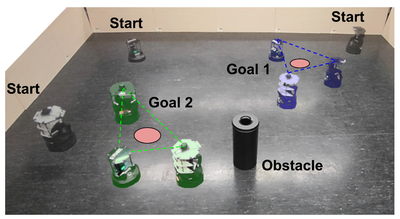
Safe Multi-Agent Reinforcement Learning for Behavior-Based Cooperative Navigation
IEEE Robotics and Automation Letters (RA-L) and presented at the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025

Automated Leaf-Level Inspection of Crops Combining UAV and UGV Robots
European Robotics Forum (ERF), 2025
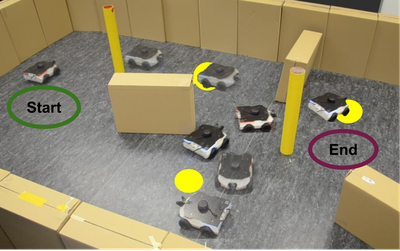
A Dynamic Safety Shield for Safe and Efficient Reinforcement Learning of Navigation Tasks
Learning for Dynamics and Control (L4DC), 2025
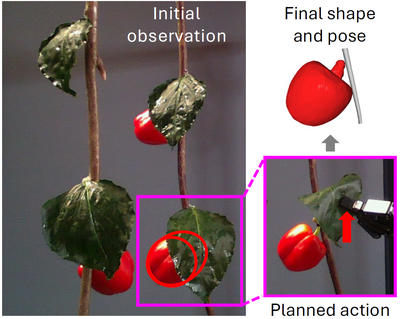
Safe Leaf Manipulation for Accurate Shape and Pose Estimation of Occluded Fruits
IEEE International Conference on Robotics & Automation (ICRA), 2025