Research
Personalized Human-Robot Interaction
When robots become assistants to humans, they need to not only be efficient and safe, but also be intuitive and explainable. Furthermore, they should adapt to the individual preferences of the user. We investigate methods to enable robots to anticipate human behavior, adapt to personal preferences, plan accordingly, and react to unforeseen changes in human actions in a natural manner.
Associated Researchers:


Dr.
Lilli Bruckschen
Alumni



Related Projects:
Anticipating Human Behavior
This project focuses on creating technology for applications that predict human behavior. It covers a wide scope, including timeframes from milliseconds to hours and various levels of detail, from specific motions to general actions. The aim is to develop a comprehensive framework that doesn't isolate subproblems but integrates all aspects, allowing for accurate anticipation of human behavior, from long-term activity patterns to short-term detailed movements.

PRIVATAR - Privacy-friendly Mobile Avatars for Sick School Children
In order to promote the integration of acutely and chronically ill school children, the use of mobile robots as avatars at school offers a promising approach. Nevertheless, the robots, through their interactions and sensors, can endanger the different privacy dimensions of different people. PRIVATAR therefore aims to provide user-friendly solutions that allow users to better protect their privacy according to their own preferences through novel interactions. This gives them more control over their privacy, which goes far beyond the currently used consent forms.
Related Publications:
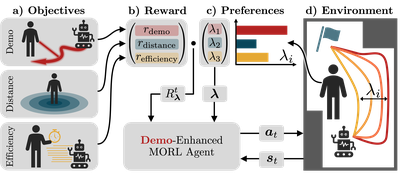
Demonstration-Enhanced Adaptable Multi-Objective Robot Navigation
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025

Ensemble Policies for Diverse Query-Generation in Preference Alignment of Robot Navigation
IEEE International on Human & Robot Interactive Communication (RO-MAN), 2024

Sound Matters: Auditory Detectability of Mobile Robots
IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), 2024

RHINO-VR Experience: Teaching Mobile Robotics Concepts in an Interactive Museum Exhibit
IEEE International on Human & Robot Interactive Communication (RO-MAN), 2024

Trust, (Dis)Comfort, and Voice Quality: Anthropomorphism in Verbal Interactions with NAO
HCI International 2024 Posters, 2024

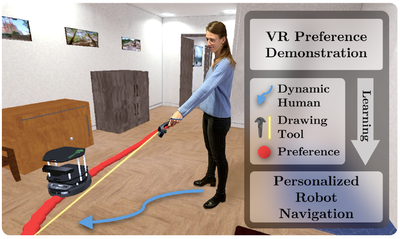
Learning Depth Vision-Based Personalized Robot Navigation From Dynamic Demonstrations in Virtual Reality
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023

Learning Personalized Human-Aware Robot Navigation Using Virtual Reality Demonstrations from a User Study
IEEE International on Human & Robot Interactive Communication (RO-MAN), 2022
Working with Robots: Design and Evaluation of an introductory Computer Science Teaching Unit with Educational Robots
European Conference on Education (ECE), 2022
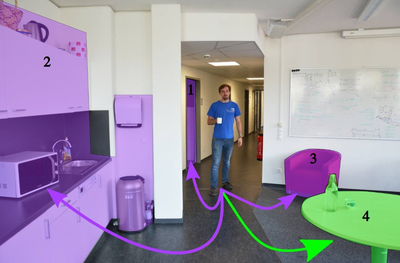
Human-Aware Robot Navigation Based on Learned Cost Values from User Studies
IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), 2021
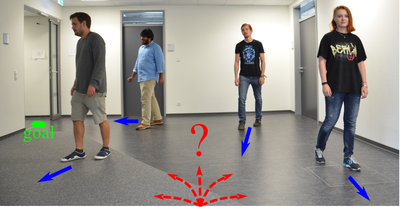
Predicting Human Navigation Goals based on Bayesian Inference and Activity Regions.
Robotics and Autonomous Systems (RAS), 2020
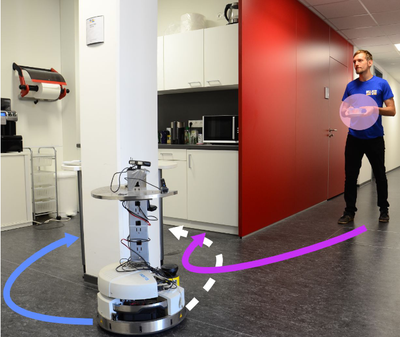
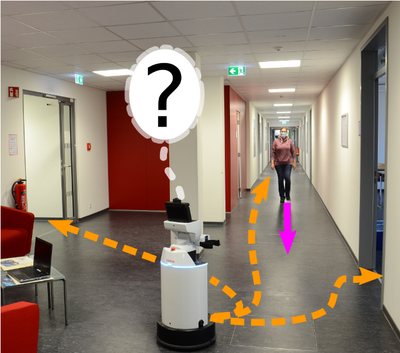
Human-Aware Robot Navigation by Long-Term Movement Prediction
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020

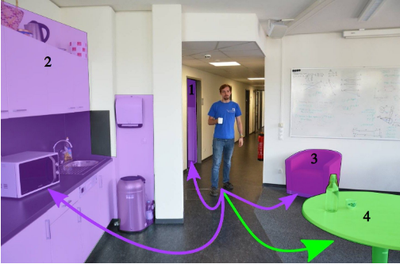
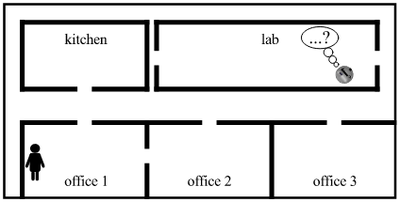
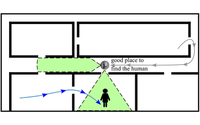
Where Can I Help? Human-Aware Placement of Service Robots
Proceedings of the IEEE Conference on Robot and Human Interactive Communication (RO-MAN), 2020

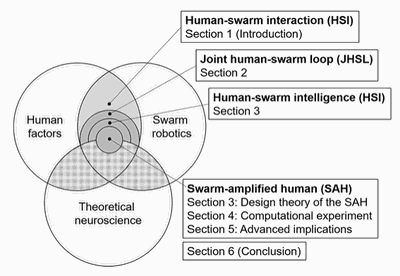
On the Importance of Adaptive Operator Training in Human-Swarm Interaction
Proceedings of the International Conference on Human-Computer Interaction (HCII), 2020
Applying the Popov-Vereshchagin Hybrid Dynamics Solver for Teleoperation under Instantaneous Constraints
Proceedings of the International Conferences on Advanced Robotics (ICAR), 2019

Detection of Generic Human-Object Interactions in Video Streams
Proceedings of the International Conference on Social Robotics (ICSR), 2019

Human Motion Prediction Based on Object Interactions
Proceedings of the European Conference on Mobile Robots (ECMR), 2019
Improving Navigation with the Social Force Model by Learning a Neural Network Controller in Pedestrian Crowds
Proceedings of the European Conference on Mobile Robots (ECMR), 2019

People Finding under Visibility Constraints using Graph-Based Motion Prediction
International Conference on Intelligent Autonomous Systems, 2018