Research
Intelligent Manipulation
In cluttered scenes, and with unknown objects, typical pick and place pipelines are sub-optimal. Assembly and rearrangement tasks require flexible manipulation modes using both prehensile and non-prehensile approaches with multimodal perception.


Associated Researchers:





Related Projects:

RePAIR - Reconstructing the Past: Artificial Intelligence and Robotics Meet Cultural Heritage
The 'RePAIR' project combines Artificial Intelligence and Robotics with Cultural Heritage to create technology that simplifies the reconstruction of shattered artworks. This innovation aims to address the challenge of piecing together damaged or incomplete ancient artifacts like vases, amphorae, and frescoes, often found in fragments at excavation sites worldwide.
Related Publications:

A Robust Placeability Metric for Model-Free Unified Pick-and-Place Reasoning
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2026
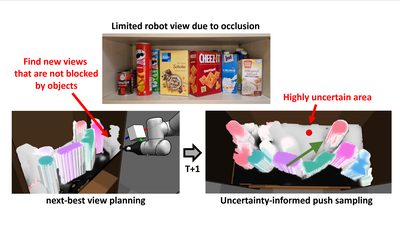
Efficient Manipulation-Enhanced Semantic Mapping With Uncertainty-Informed Action Selection
IEEE/RAS International Conference on Humanoid Robots (Humanoids), 2025
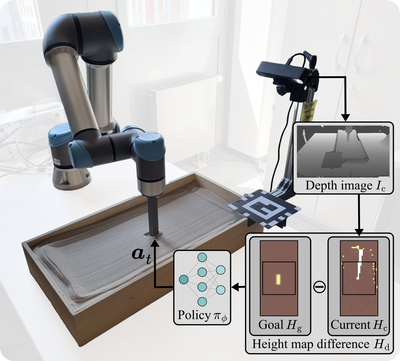
Interactive Shaping of Granular Media Using Reinforcement Learning
IEEE-RAS International Conference on Humanoid Robots (Humanoids), 2025
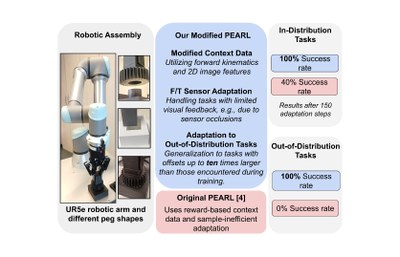
Context-Based Meta Reinforcement Learning for Robust and Adaptable Peg-in-Hole Assembly Tasks
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025

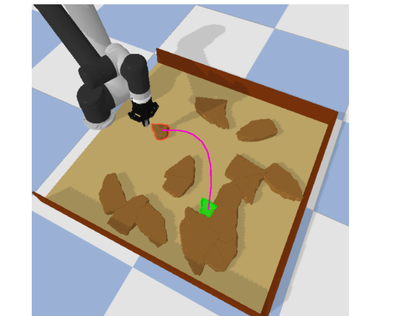
Learning Goal-Directed Object Pushing in Cluttered Scenes with Location-Based Attention
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025
Map Space Belief Prediction for Manipulation-Enhanced Mapping
Robotics: Science and Systems (RSS), 2025
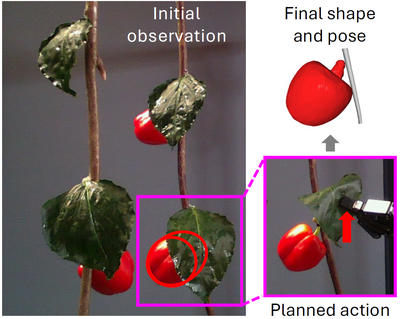
Safe Leaf Manipulation for Accurate Shape and Pose Estimation of Occluded Fruits
IEEE International Conference on Robotics & Automation (ICRA), 2025
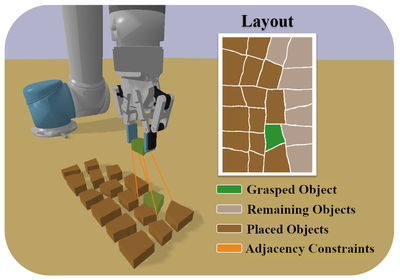
Compact Multi-Object Placement Using Adjacency-Aware Reinforcement Learning
IEEE-RAS International Conference on Humanoid Robots (Humanoids), 2024

HortiBot: An Adaptive Multi-Arm System for Robotic Horticulture of Sweet Peppers
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024

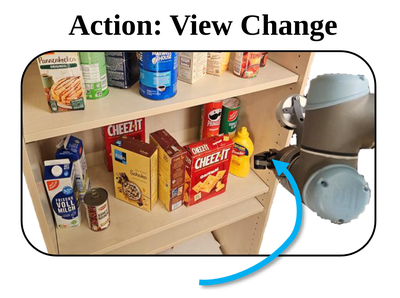
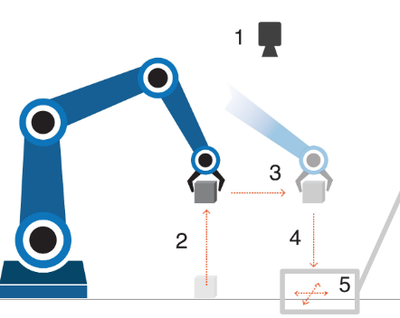
Viewpoint Push Planning for Mapping of Unknown Confined Spaces
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023
Reactive Correction of Object Placement Errors for Robotic Arrangement Tasks
International Conference on Intelligent Autonomous Systems (IAS-18), 2023
Learning Goal-Directed Non-Prehensile Pushing in Cluttered Scenes
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2022