RePAIR - Reconstructing the Past: Artificial Intelligence and Robotics Meet Cultural Heritage
The 'RePAIR' project combines Artificial Intelligence and Robotics with Cultural Heritage to create technology that simplifies the reconstruction of shattered artworks. This innovation aims to address the challenge of piecing together damaged or incomplete ancient artifacts like vases, amphorae, and frescoes, often found in fragments at excavation sites worldwide.


Project Abstract:
The main goal of the RePAIR project is to develop innovative technology to virtually eliminate one of the most laborious and frustrating steps in archaeological research, namely the physical reconstruction of shattered works of art. In fact, countless vases, amphorae, frescoes and other ancient artifacts, around the world, have not survived intact and have been extracted from excavation sites as large collections of fragments, many of which are damaged, worn out or entirely missing.
We are responsible for the Integration and evaluation of the robotic system and will provide techniques for planning of bi-manual arm motions and planning algorithms to place the fresco pieces at the desired poses.
Links:
Associated Researchers:



Associated Student Assistants:

B.Sc.
Muhammad Ehsan Ullah
Student Assistant
Related Publications:
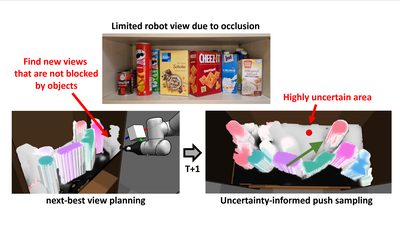
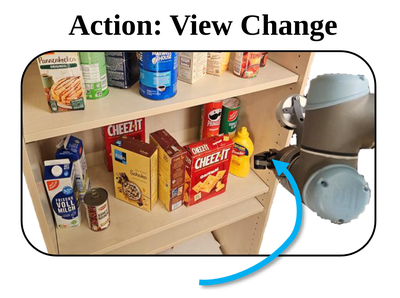
Efficient Manipulation-Enhanced Semantic Mapping With Uncertainty-Informed Action Selection
IEEE/RAS International Conference on Humanoid Robots (Humanoids), 2025
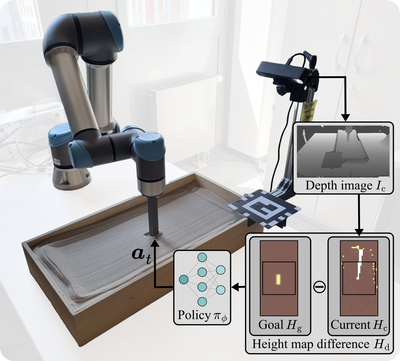
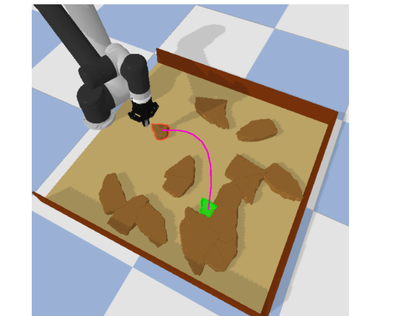
Interactive Shaping of Granular Media Using Reinforcement Learning
IEEE-RAS International Conference on Humanoid Robots (Humanoids), 2025

Learning Goal-Directed Object Pushing in Cluttered Scenes with Location-Based Attention
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025
Map Space Belief Prediction for Manipulation-Enhanced Mapping
Robotics: Science and Systems (RSS), 2025
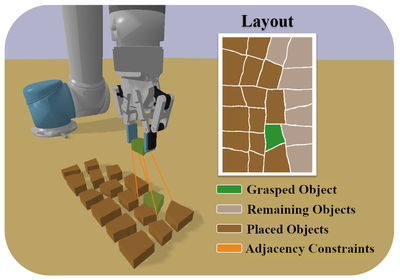
Compact Multi-Object Placement Using Adjacency-Aware Reinforcement Learning
IEEE-RAS International Conference on Humanoid Robots (Humanoids), 2024
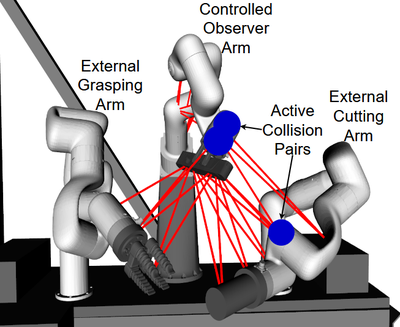
DawnIK: Decentralized Collision-Aware Inverse Kinematics Solver for Heterogeneous Multi-Arm Systems
IEEE-RAS International Conference on Humanoid Robots (Humanoids), 2023

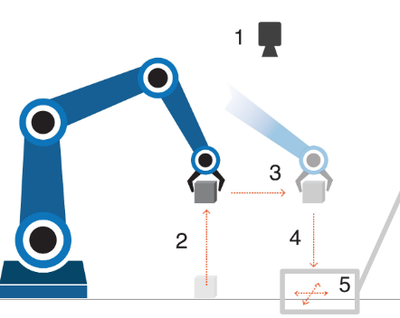
Viewpoint Push Planning for Mapping of Unknown Confined Spaces
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023
Reactive Correction of Object Placement Errors for Robotic Arrangement Tasks
International Conference on Intelligent Autonomous Systems (IAS-18), 2023
Learning Goal-Directed Non-Prehensile Pushing in Cluttered Scenes
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2022