Robotics Institute Germany
The Robotics Institute Germany is an initiative by the German Federal Ministry of Research, Technology and Space~(BMFTR) aimed at connecting leading robotics labs across Germany to enhance their international visibility, attract talent, and accelerate progress in AI-powered robotics.

Project Abstract:
The Robotics Institute Germany (RIG), jointly established by Germany’s leading robotics centers, is to become the central contact point for robotics in Germany. The project, funded by the German Federal Ministry of Research, Technology and Space (BMFTR) for the next four years, started on July 1, 2024.
Links:
Project Members:
Associated Researchers:



Associated Student Assistants:

B.Sc.
Jesper Mücke
Student Assistant
Selected Research

A Robust Placeability Metric for Model-Free Unified Pick-and-Place Reasoning
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2026
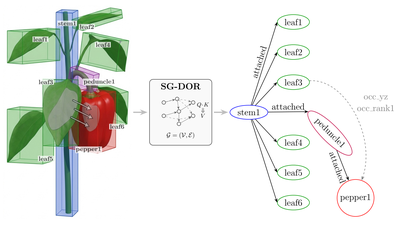
SG-DOR: Learning Scene Graphs with Direction-Conditioned Occlusion Reasoning for Pepper Plants
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2026
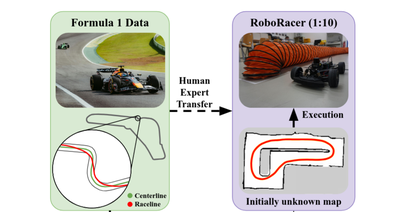
Efficient Trajectory Optimization for Autonomous Racing via Formula-1 Data-Driven Initialization
IEEE International Conference on Intelligent Transportation Systems (ITSC), 2026
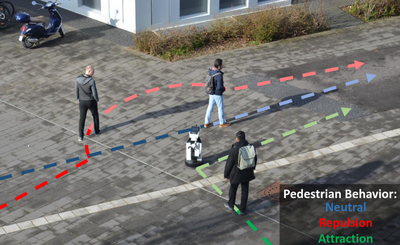
PeRoI: A Pedestrian-Robot Interaction Dataset for Learning Avoidance, Neutrality, and Attraction Behaviors in Social Navigation
IEEE International Conference on Robotics & Automation (ICRA), 2026
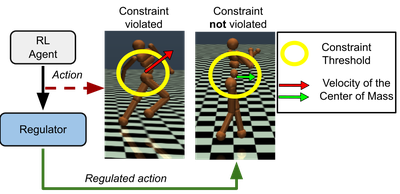
Constraint-Aware Reinforcement Learning via Adaptive Action Scaling
Learning for Dynamics & Control Conference (L4DC), 2026

An Approach to Joint Hybrid Decision Making Between Humans and Artificial Intelligence
Studies in Neuroscience, Psychology and Behavioral Economics (SNPBE), 2025
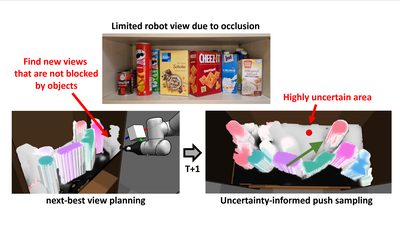
Efficient Manipulation-Enhanced Semantic Mapping With Uncertainty-Informed Action Selection
IEEE/RAS International Conference on Humanoid Robots (Humanoids), 2025
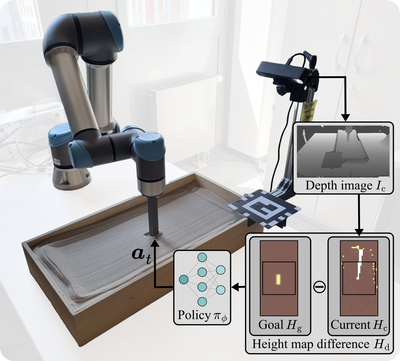
Interactive Shaping of Granular Media Using Reinforcement Learning
IEEE-RAS International Conference on Humanoid Robots (Humanoids), 2025
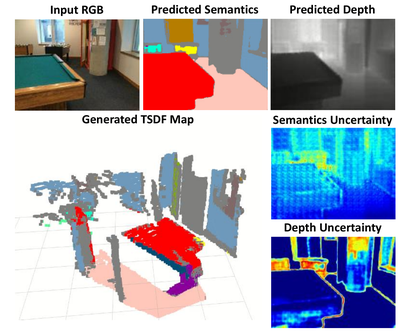
EvidMTL: Evidential Multi-Task Learning for Uncertainty-Aware Semantic Surface Mapping from Monocular RGB Images
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025
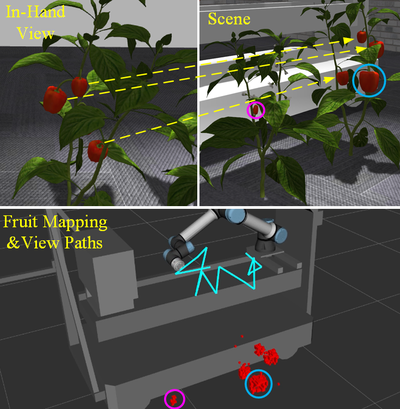
GO-VMP: Global Optimization for View Motion Planning in Fruit Mapping
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025
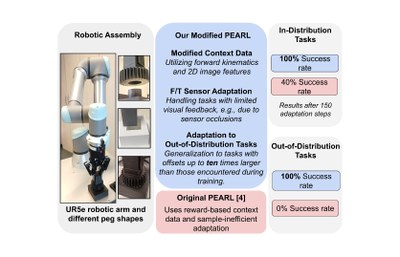
Context-Based Meta Reinforcement Learning for Robust and Adaptable Peg-in-Hole Assembly Tasks
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025
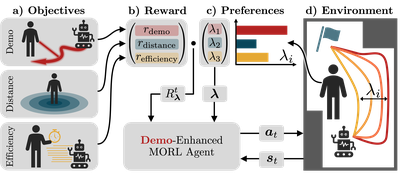
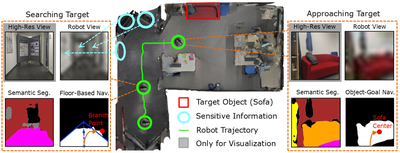
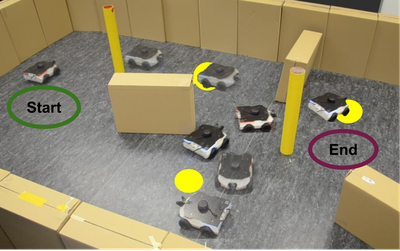
Demonstration-Enhanced Adaptable Multi-Objective Robot Navigation
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025
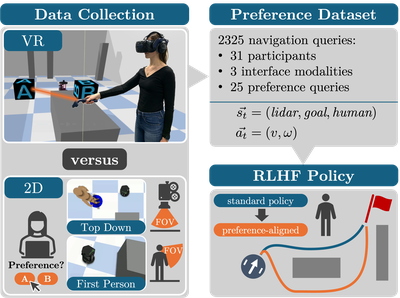
The Impact of VR and 2D Interfaces on Human Feedback in Preference-Based Robot Learning
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025

Learning Goal-Directed Object Pushing in Cluttered Scenes with Location-Based Attention
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025
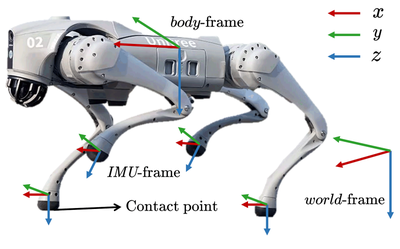
DogLegs: Robust Proprioceptive State Estimation for Legged Robots Using Multiple Leg-Mounted IMUs
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025
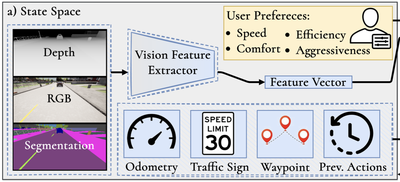
Multi-Objective Reinforcement Learning for Adaptive Personalized Autonomous Driving
European Conference on Mobile Robots (ECMR 2025), 2025
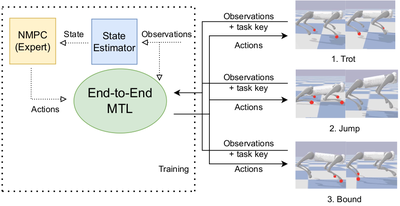
End-to-End Multi-Task Policy Learning from NMPC for Quadruped Locomotion
European Conference on Mobile Robots (ECMR), 2025
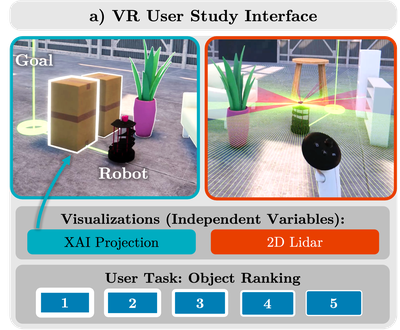
Immersive Explainability: Visualizing Robot Navigation Decisions through XAI Semantic Scene Projections in Virtual Reality
IEEE International on Human & Robot Interactive Communication (RO-MAN), 2025
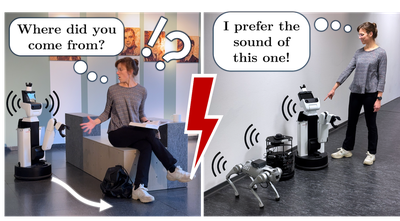
Auditory Localization and Assessment of Consequential Robot Sounds: A Multi-Method Study in Virtual Reality
IEEE International on Human & Robot Interactive Communication (RO-MAN), 2025
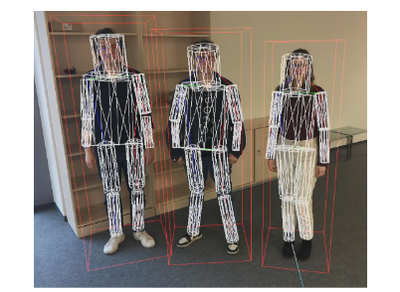
Towards Rhino-AR: A System for Real-Time 3D Human Pose Estimation and Volumetric Scene Integration on Embedded AR Headsets
International Conference on Virtual Reality (ICVR), 2025
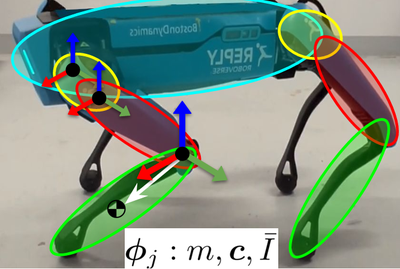
Physically-Consistent Parameter Identification of Robots in Contact
IEEE International Conference on Robotics & Automation (ICRA), 2025
Map Space Belief Prediction for Manipulation-Enhanced Mapping
Robotics: Science and Systems (RSS), 2025
Safe Multi-Agent Reinforcement Learning for Behavior-Based Cooperative Navigation
IEEE Robotics and Automation Letters (RA-L) and presented at the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025
A Dynamic Safety Shield for Safe and Efficient Reinforcement Learning of Navigation Tasks
Learning for Dynamics and Control (L4DC), 2025
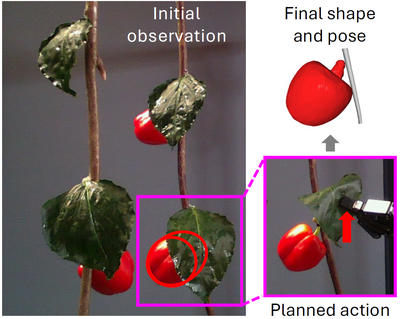
Safe Leaf Manipulation for Accurate Shape and Pose Estimation of Occluded Fruits
IEEE International Conference on Robotics & Automation (ICRA), 2025
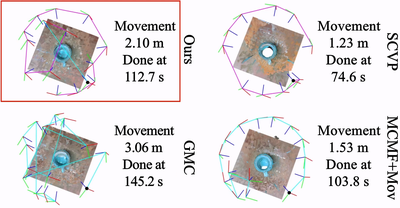
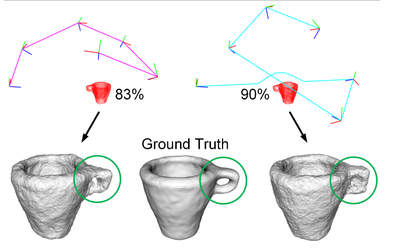
Integrating One-Shot View Planning with a Single Next-Best View via Long-Tail Multiview Sampling
IEEE Transactions on Robotics (T-RO), 2024
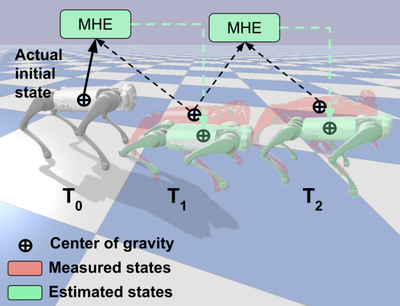
Centroidal State Estimation based on the Koopman Embedding for Dynamic Legged Locomotion
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024
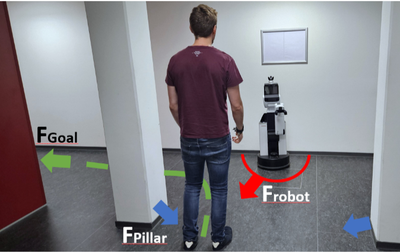
Evaluating Robot Influence on Pedestrian Behavior Models for Crowd Simulation and Benchmarking
International Conference on Social Robotics +AI (ICSR), 2024
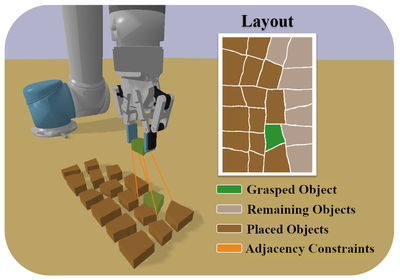
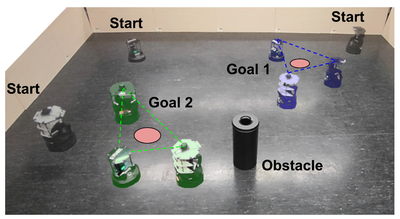
Compact Multi-Object Placement Using Adjacency-Aware Reinforcement Learning
IEEE-RAS International Conference on Humanoid Robots (Humanoids), 2024
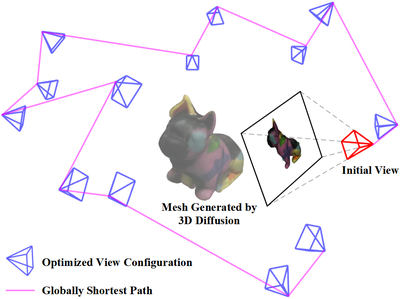
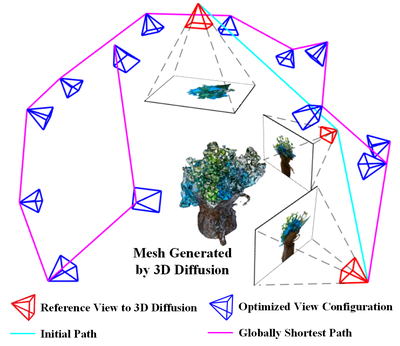
Exploiting Priors from 3D Diffusion Models for RGB-Based One-Shot View Planning
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024

HortiBot: An Adaptive Multi-Arm System for Robotic Horticulture of Sweet Peppers
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024
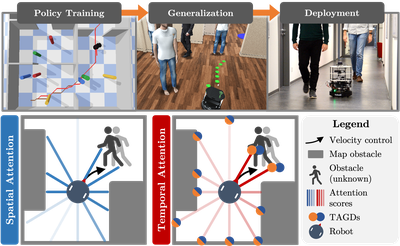
Spatiotemporal Attention Enhances Lidar-Based Robot Navigation in Dynamic Environments
IEEE Robotics and Automation Letters (RA-L), presented at the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024

Ensemble Policies for Diverse Query-Generation in Preference Alignment of Robot Navigation
IEEE International on Human & Robot Interactive Communication (RO-MAN), 2024

Sound Matters: Auditory Detectability of Mobile Robots
IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), 2024

RHINO-VR Experience: Teaching Mobile Robotics Concepts in an Interactive Museum Exhibit
IEEE International on Human & Robot Interactive Communication (RO-MAN), 2024
A Neuromorphic Approach to Obstacle Avoidance in Robot Manipulation
The International Journal of Robotics Research (IJRR), 2024

Research Priorities to Leverage Smart Digital Technologies for Sustainable Crop Production
European Journal of Agronomy, 2024
Active Implicit Reconstruction Using One-Shot View Planning
IEEE International Conference on Robotics and Automation (ICRA), 2024
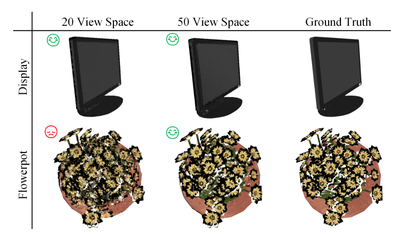
How Many Views Are Needed to Reconstruct an Unknown Object Using NeRF?
IEEE International Conference on Robotics and Automation (ICRA), 2024