
M.Sc.
Tobias Zaenker
Alumni
Contact:
Research Interest:
- Viewpoint planning
- Fruit detection
- Semantic mapping
Links:
Research Areas:
Related Projects:
My Publications:
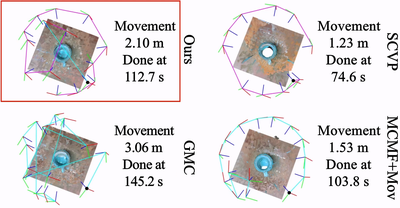
GO-VMP: Global Optimization for View Motion Planning in Fruit Mapping
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025
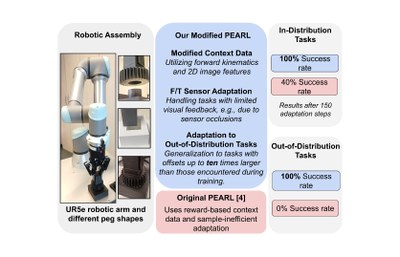
Context-Based Meta Reinforcement Learning for Robust and Adaptable Peg-in-Hole Assembly Tasks
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025
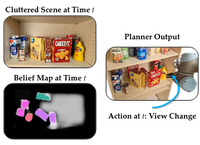
Map Space Belief Prediction for Manipulation-Enhanced Mapping
Robotics: Science and Systems (RSS), 2025

Automated Leaf-Level Inspection of Crops Combining UAV and UGV Robots
European Robotics Forum (ERF), 2025
Integrating One-Shot View Planning with a Single Next-Best View via Long-Tail Multiview Sampling
IEEE Transactions on Robotics (T-RO), 2024

NBV-SC: Next Best View Planning based on Shape Completion for Fruit Mapping and Reconstruction
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023
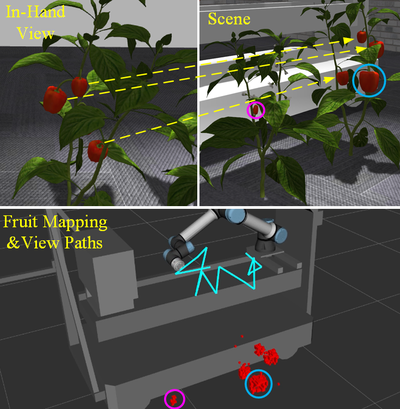
Graph-based View Motion Planning for Fruit Detection
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023
Fruit Mapping with Shape Completion for Autonomous Crop Monitoring
IEEE International Conference on Automation Science and Engineering (CASE), 2022

Deep Reinforcement Learning for Next-Best-View Planning in Agricultural Applications
IEEE International Conference on Robotics & Automation (ICRA), 2022
Combining Local and Global Viewpoint Planning for Fruit Coverage
European Conference on Mobile Robots (ECMR), 2021

Online Object-Oriented Semantic Mapping and Map Updating
European Conference on Mobile Robots (ECMR), 2021
Viewpoint Planning for Fruit Size and Position Estimation
Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021
PATHoBot: A Robot for Glasshouse Crop Phenotyping and Intervention.
IEEE International Conference on Robotics & Automation (ICRA), 2021