Loading
Overview
We develop techniques that allow robots to adapt their behavior to the environment and to the surrounding people, thereby exploiting semantic information about objects and information about the activities of users. Currently, we especially focus on motion planning and navigation through cluttered and dynamic scenes as well as on generating foresighted robot behavior by predicting human motions. A further research focus of our group lies on active perception such as the coverage of objects in indoor scenes or crops in glasshouses with a robot's sensors to learn 3D models over time.
Find our code here:

Our Robots:
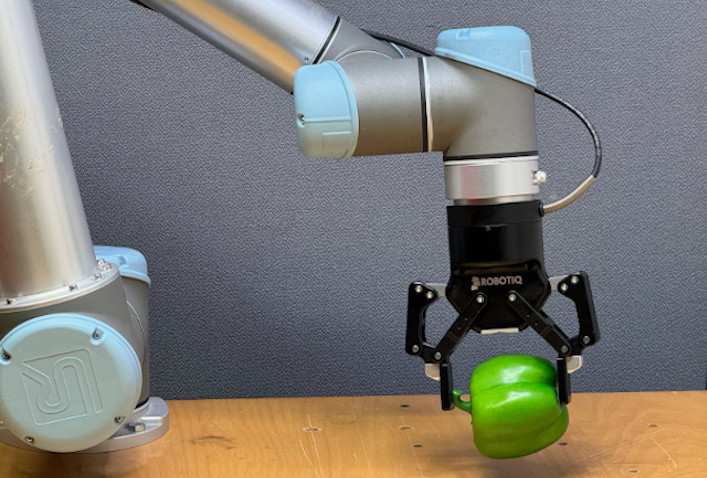
Robotic arms
... are often used in industry for more efficient workflows, and hence are a popular research topic. They can be used to grasp, move, or better observe objects from different angles.
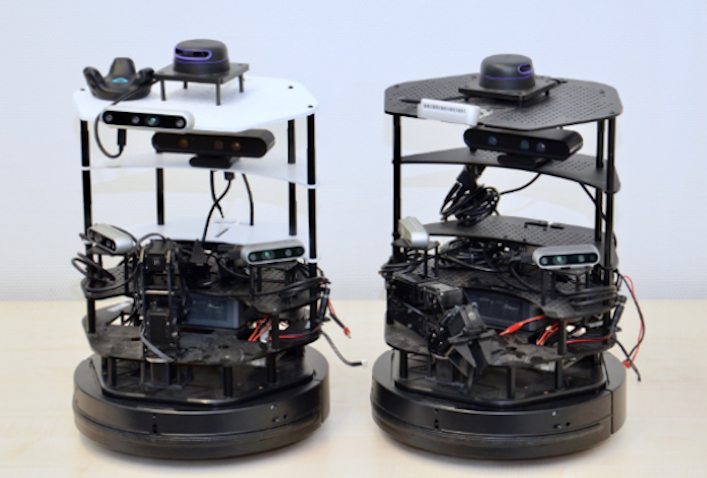
Turtlebot
... is a mobile robot and can be used for various navigation tasks. Equipped with a laser scanner, cameras, and more, it perceives its environment and avoids obstacles.

Human Support Robot
… combines the best of both worlds. While the mobile robot can move through the environment, the arm can be used to manipulate objects and assist humans.

Unitree GO1
... an agile quadruped that is adept at walking, running, climbing across terrains. Ideal for robotics research, AI development, and automated surveillance applications, showcasing advanced locomotion and stability.

Nao
… is a humanoid robot that is well suited for teaching. Despite its small size, problems such as climbing stairs can be solved and later transferred to real applications.

Dexterous 5-finger hand
... a cutting-edge bionic hand that closely mimics natural hand functionality. Equipped with sensory feedback, it enables the robot to feel touch, enhancing the manipulation experience. Built for durability and water resistance, it's well-suited for everyday use.
Research Areas:
Ongoing Projects:
Loading
Previous Projects:
- SQUIRREL- Autonomous robots deployed in unstructured domestic settings, affecting navigation, manipulation, vision, human robot interaction and planning
- ROVINA- Robots for Exploration, Digital Preservation and Visualization of Archeological Sites
- First-MM- Flexible Skill Acquisition and Intuitive Robot Tasking for Mobile Manipulation
- SFB/TR8 Spatial Cognition- Trans-regional interdisciplinary collaborative research center on Spatial Cognition: Reasoning, Action, Interaction
- BrainLinks-BrainTools- Cluster of Excellence for basic research of the nervous system, the development of new materials and technical devices, and the implementation of customised robotics to face the challenge of connecting technical systems to the nervous system
- Embedded Microsystems- Research Training Group to integrate intelligent and communication-enabled units into everyday objects