Intelligent ManipulationIn cluttered scenes, and with unknown objects, typical pick and place pipelines are sub-optimal. Assembly and rearrangement tasks require flexible manipulation modes using both prehensile and non-prehensile approaches with multimodal perception. https://www.hrl.uni-bonn.de/api/research/intelligent-manipulationhttps://www.hrl.uni-bonn.de/api/research/intelligent-manipulation/@@images/image-1200-0d57e12750d4076717f7f45cbb7f9358.png
Intelligent Manipulation
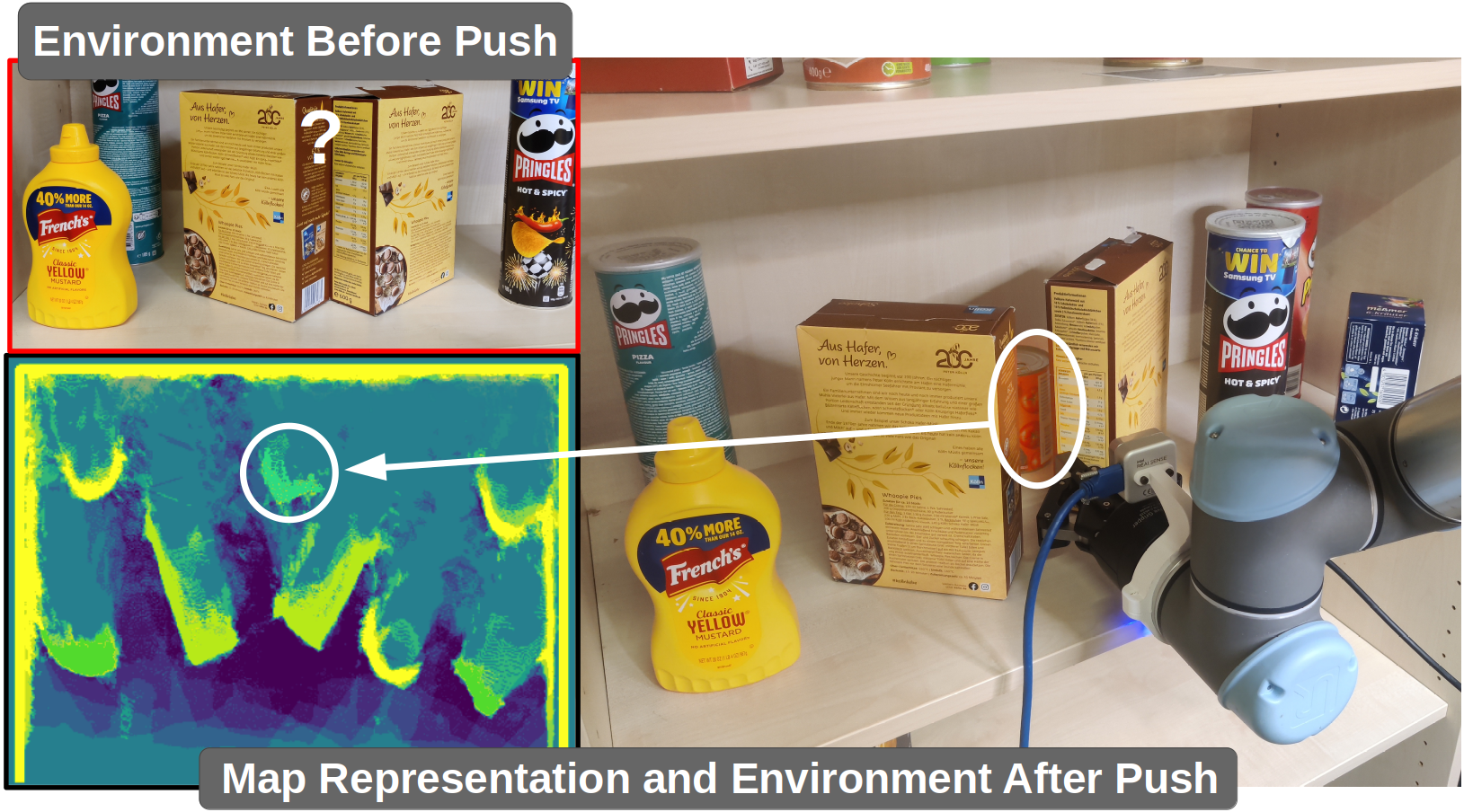
In cluttered scenes, and with unknown objects, typical pick and place pipelines are sub-optimal. Assembly and rearrangement tasks require flexible manipulation modes using both prehensile and non-prehensile approaches with multimodal perception.
Topic Type
Research
Topic Description
In cluttered scenes, and with unknown objects, typical pick and place pipelines are sub-optimal. Assembly and rearrangement tasks require flexible manipulation modes using both prehensile and non-prehensile approaches with multimodal perception.