Evaluating Robot Influence on Pedestrian Behavior Models for Crowd Simulation and Benchmarkinghttps://www.hrl.uni-bonn.de/api/publications/2024/agrawal24icsrhttps://www.hrl.uni-bonn.de/api/publications/2024/agrawal24icsr/@@images/image-1200-07054f3f0419e71228734e14dc5ba31c.png
Evaluating Robot Influence on Pedestrian Behavior Models for Crowd Simulation and Benchmarking
Publication Authors
S. Agrawal;
N. Dengler;
M. Bennewitz
Published in
International Conference on Social Robotics +AI (ICSR)
Year of Publication
2024
Abstract
The presence of robots amongst pedestrians affects them causing deviation to their trajectories. Existing methods suffer from the limitation of not being able to objectively measure this deviation in unseen cases. In order to solve this issue, we introduce a simulation framework that repetitively measures and benchmarks the deviation in trajectory of pedestrians due to robots driven by different navigation algorithms.
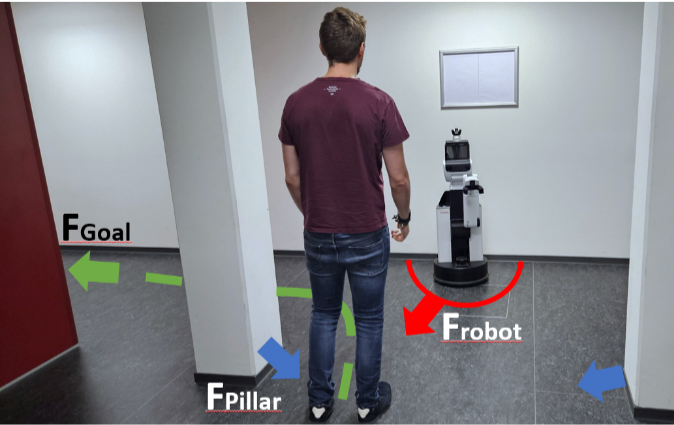
We simulate the deviation behavior of the pedestrians using an enhanced Social Force Model (SFM) with a robot force component that accounts for the influence of robots on pedestrian behavior, resulting in the Social Robot Force Model (SRFM). The parameters for this model are learned using the pedestrian trajectories from the JRDB dataset.
The pedestrians are then simulated using the SRFM with and without the robot force component to objectively measure the deviation to their trajectory caused by the robot in 5 different scenarios.
Our work in this paper is a proof of concept that shows that objectively measuring the pedestrian reaction to robot is possible. We use our simulation to train two different reinforcement learning policies and evaluate them against traditional navigation models.