People Finding under Visibility Constraints using Graph-Based Motion Predictionhttps://www.hrl.uni-bonn.de/api/publications/2018/bayoumi18iashttps://www.hrl.uni-bonn.de/api/publications/2018/bayoumi18ias/@@images/image-1200-8199a5b28c62327c885115a48d928b3a.png
People Finding under Visibility Constraints using Graph-Based Motion Prediction
Publication Authors
A. Bayoumi;
P. Karkowski;
M. Bennewitz
Published in
International Conference on Intelligent Autonomous Systems
Year of Publication
2018
Abstract
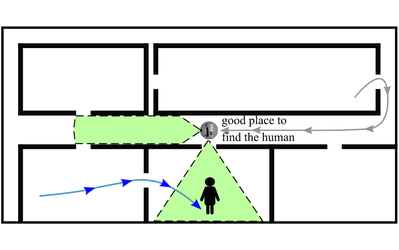
An autonomous service robot often first has to search for a
user to carry out a desired task. This is a challenging problem, especially
when this person moves around since the robot’s field of view is con-
strained and the environment structure typically poses further visibility
constraints that influence the perception of the user. In this paper, we
propose a novel method that computes the likelihood of the user’s ob-
servability at each possible location in the environment based on Monte
Carlo simulations. As the robot needs time to reach the possible search
locations, we take this time as well as the visibility constraints into ac-
count when computing effective search locations. In this way, the robot
can choose the next search location that has the maximum expected
observability of the user. Our experiments in various simulated environ-
ments demonstrate that our approach leads to a significantly shorter
search time compared to a greedy approach with background informa-
tion. Using our proposed technique the robot can find the user with a
search time reduction of 20% compared to the informed greedy method.